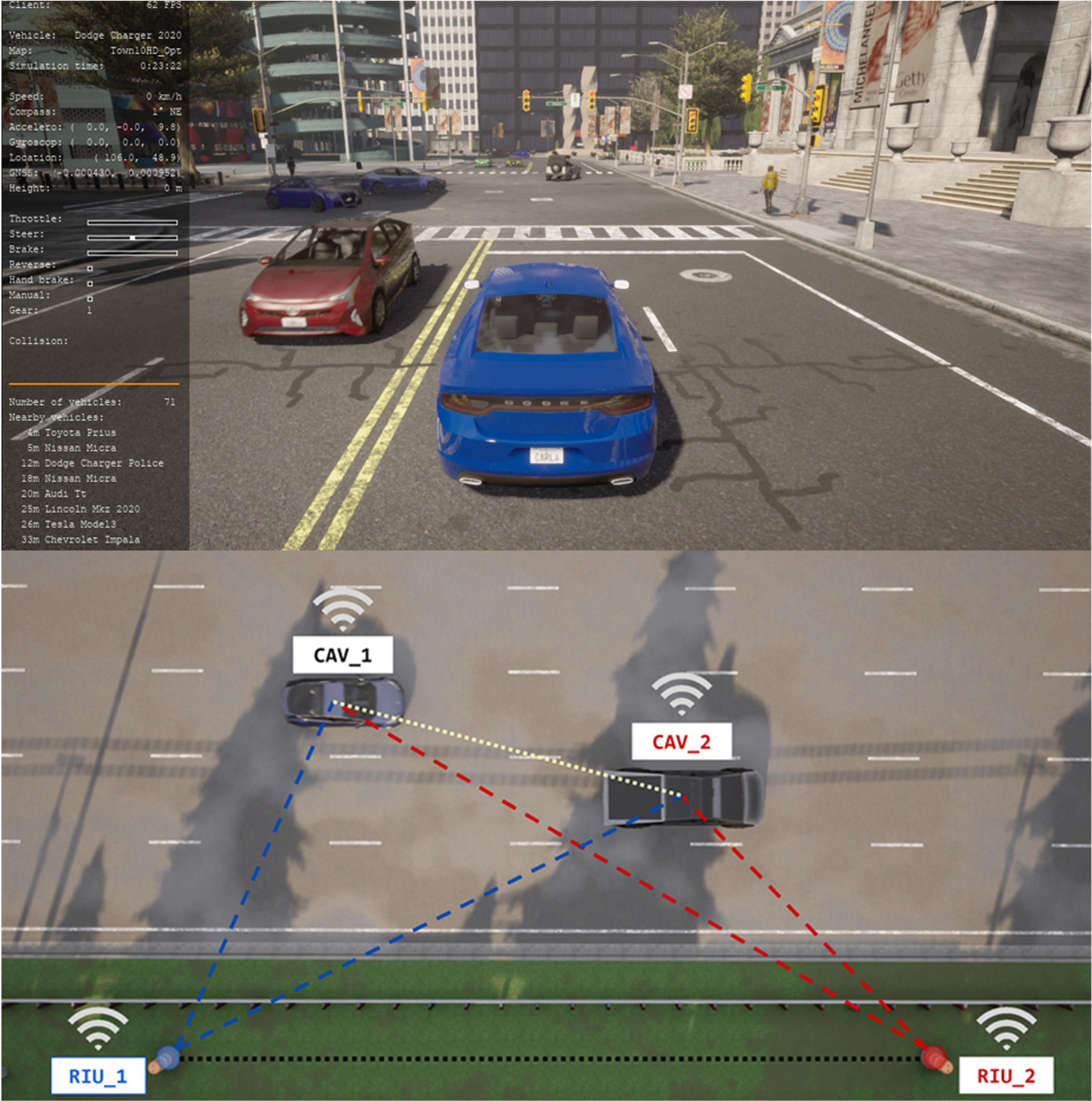
CARLA Automated Driving Simulation Project
In my leadership role, I guided a team of over 40 undergraduates in researching connected and automated driving concepts, with a particular focus on collaborative driving simulations within the CARLA environment. My responsibilities included directing the development and integration of roadside camera-based object detection and tracking systems. This process encompassed data collection, labeling, transfer learning, and integration into the CARLA simulation. Additionally, I was instrumental in designing and overseeing the development of vehicle control strategies, which included longitudinal and lateral control, deep reinforcement learning model development, and executing obstacle avoidance tasks.