Research Directions </>
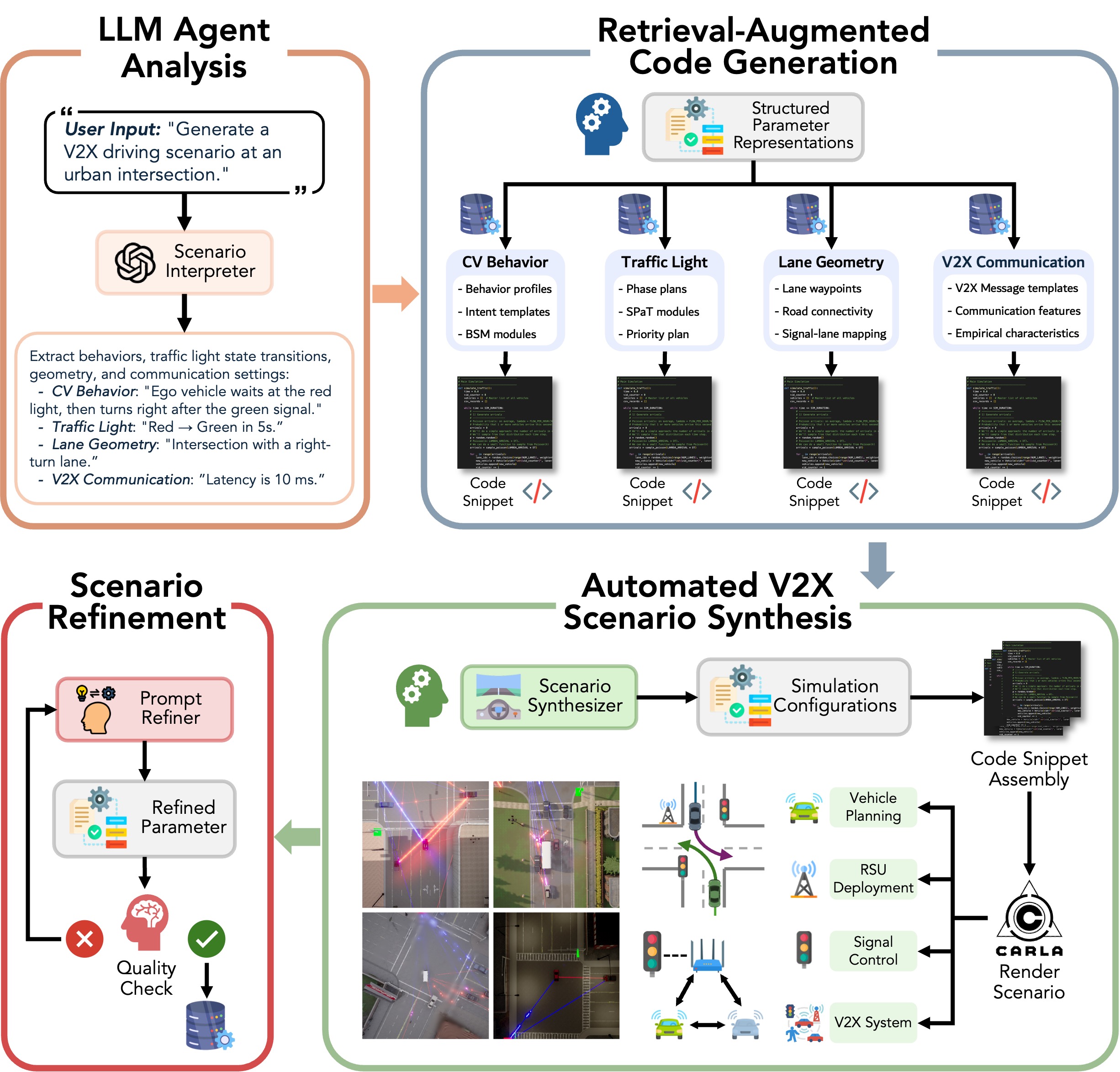
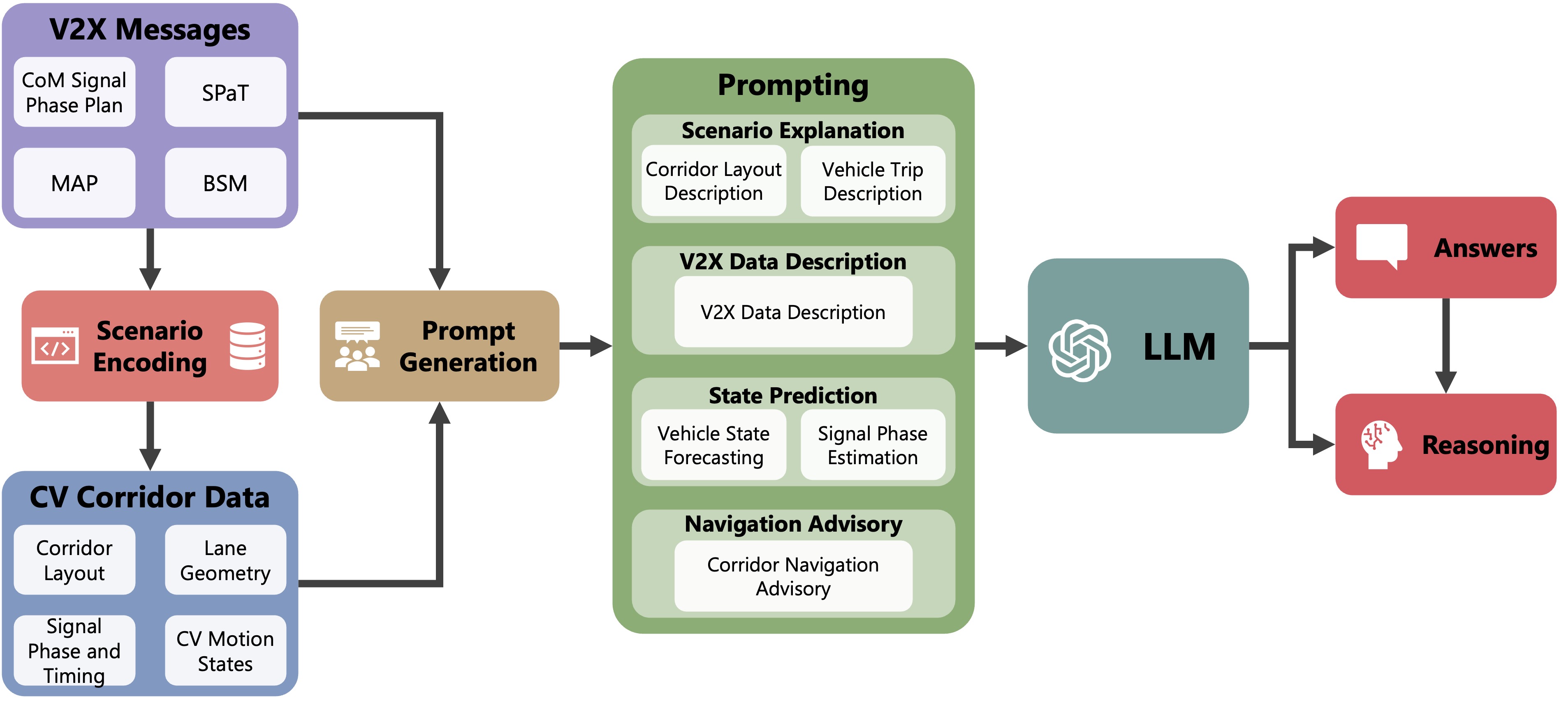
LLM-Powered V2X Intelligence for CAV & ITS
LLM-driven understanding, prediction, and advisory across connected corridors and digital twins.
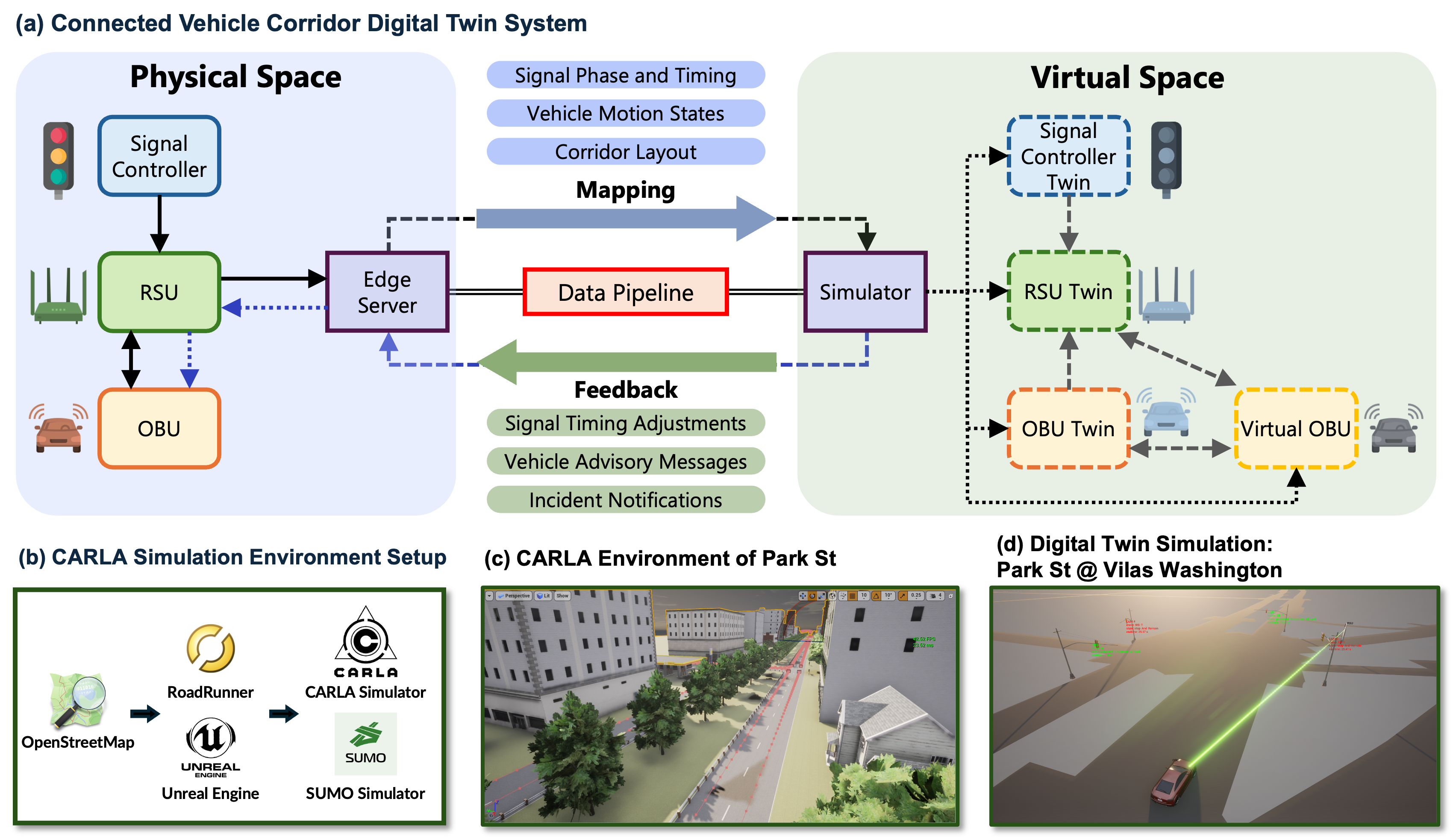
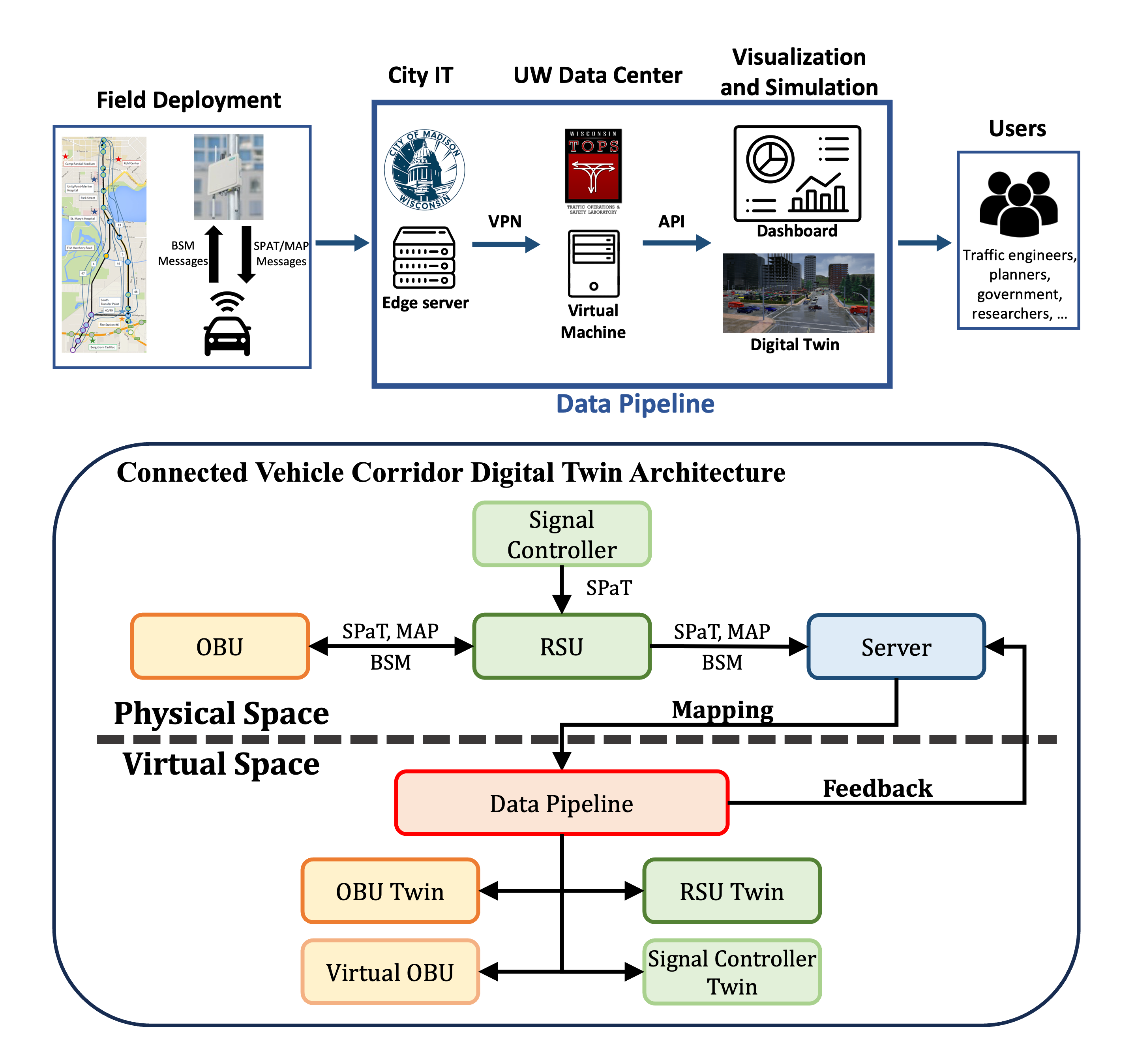
Digital Twins & Simulation with V2X Data Pipelines
Real-time physical–virtual integration, standards-compliant data ingestion, and closed-loop control.

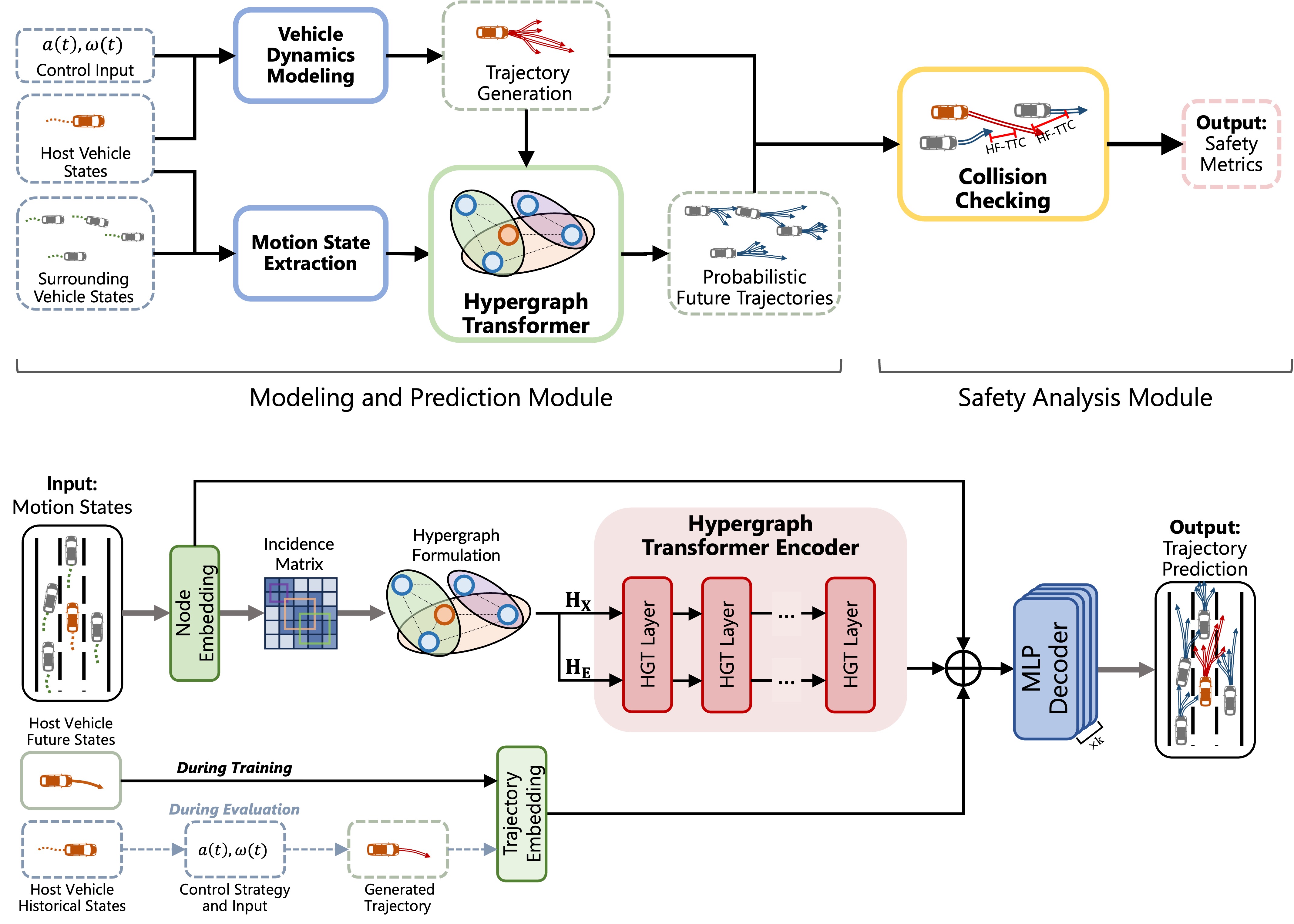
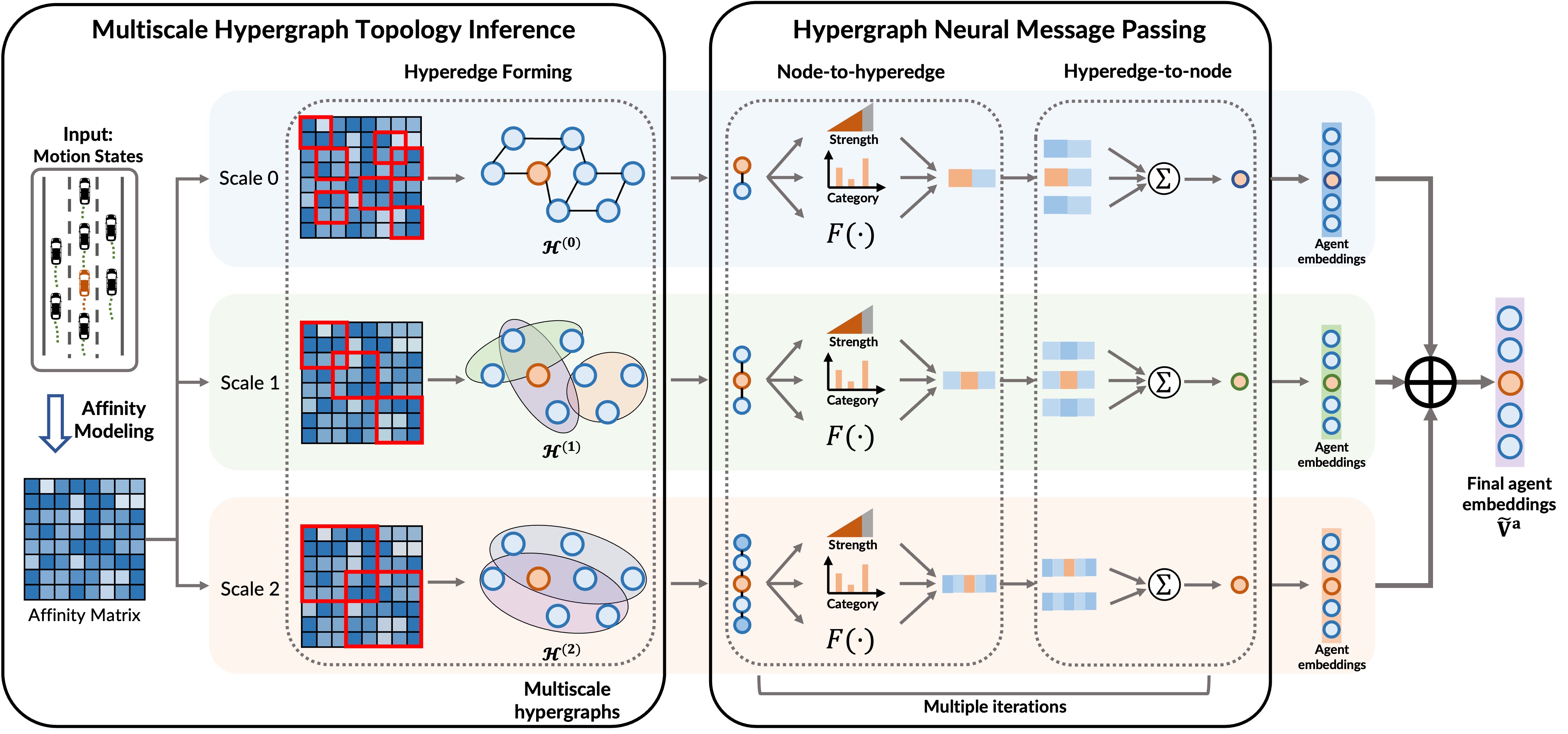
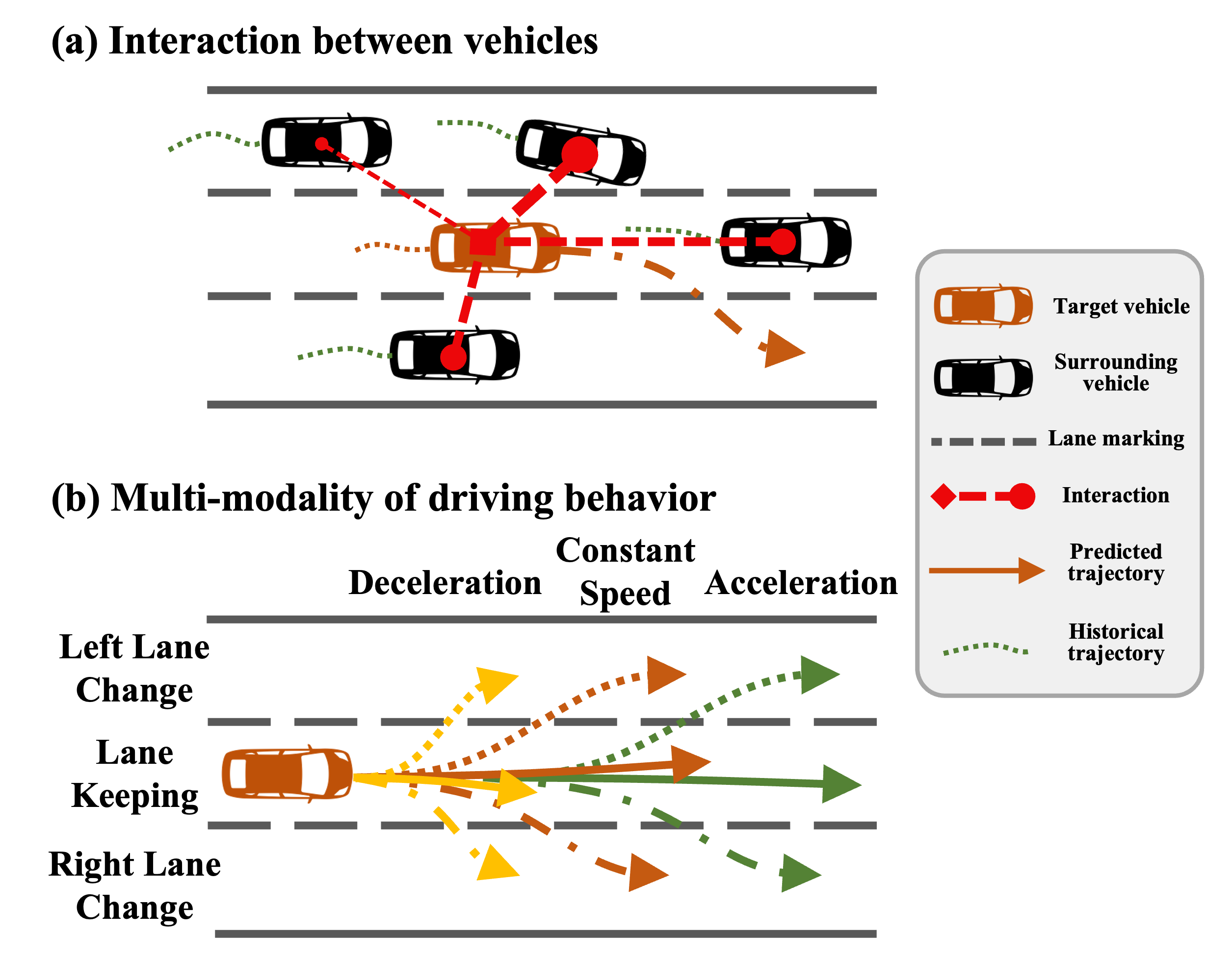
Interaction-Aware Reasoning for Multi-Agent Motion & Active Safety
Relational models (graphs/hypergraphs) fused with vehicle dynamics for predictive safety and planning.
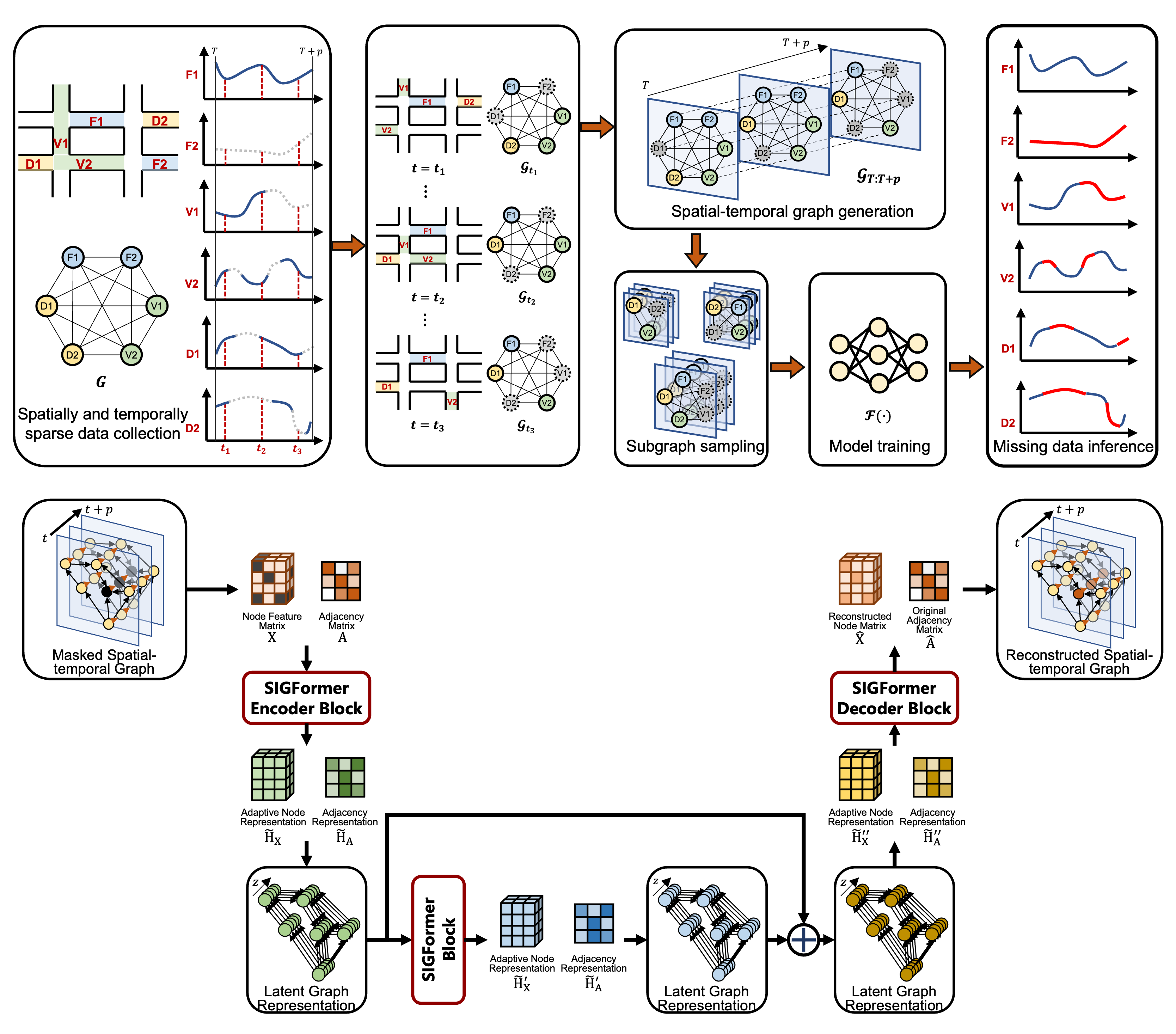
Spatial-Temporal Modeling & Network Reconstruction
Sparse-sensor data fusion and imputation for robust transportation network analytics.