01 Automated Mobility Intelligence
Interaction modeling and reasoning; motion prediction, planning, and control; mixed traffic safety analysis.
Interaction modeling and reasoning; motion prediction, planning, and control; mixed traffic safety analysis.
Digital twin simulation; physical-virtual integration; human/traffic dynamics modeling; scenario generation.
Spatiotemporal reconstruction and forecasting; geospatial network modeling; sparse-sensing data fusion.
V2X communication data pipeline; connected corridor analytics; integrated vehicle-road-cloud architecture.
LLM and VLM reasoning; generative scenario and behavior synthesis; mobility decision intelligence.
 arXiv
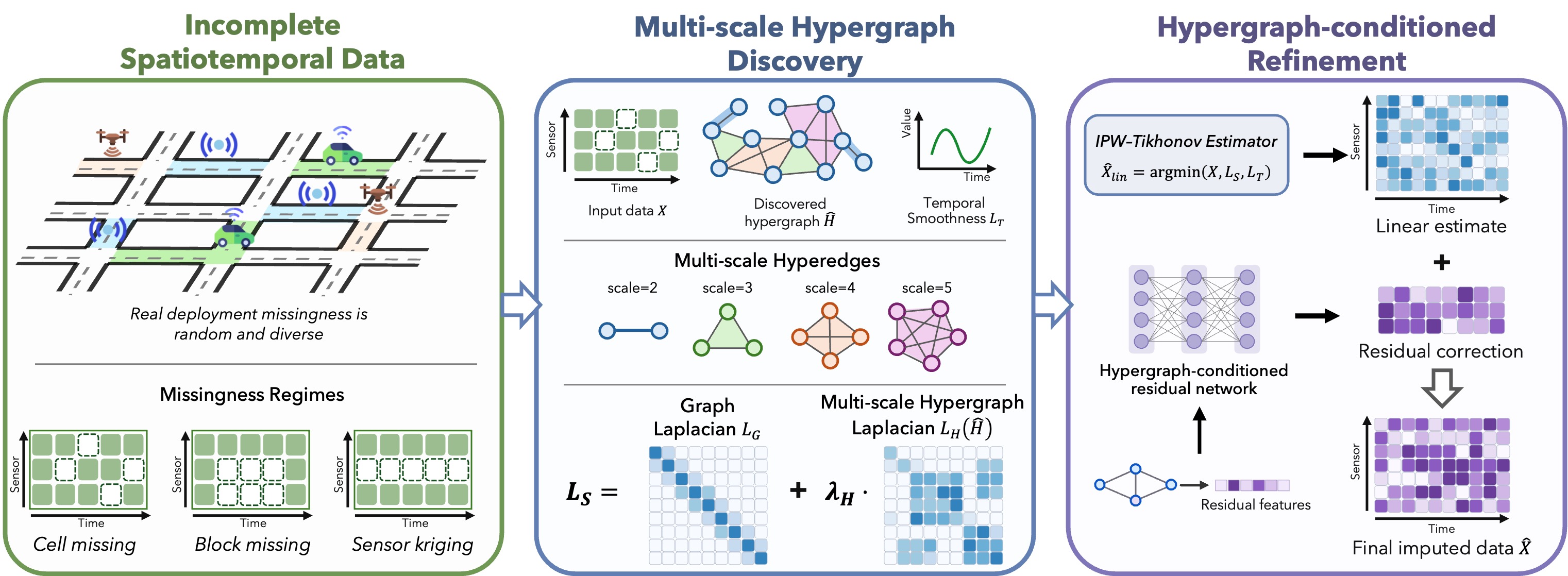
arXivWu, K., Li, S., Li, Z., Fan, Z., Li, X., Zhou, Y.
Under Review (2026)
# spatiotemporal imputation # hypergraph learning # higher-order structure
Wu, K., Li, S., Li, Z., Fan, Z., Li, X., Zhou, Y.
Under Review 2026
# spatiotemporal imputation # hypergraph learning # higher-order structure
 arXiv
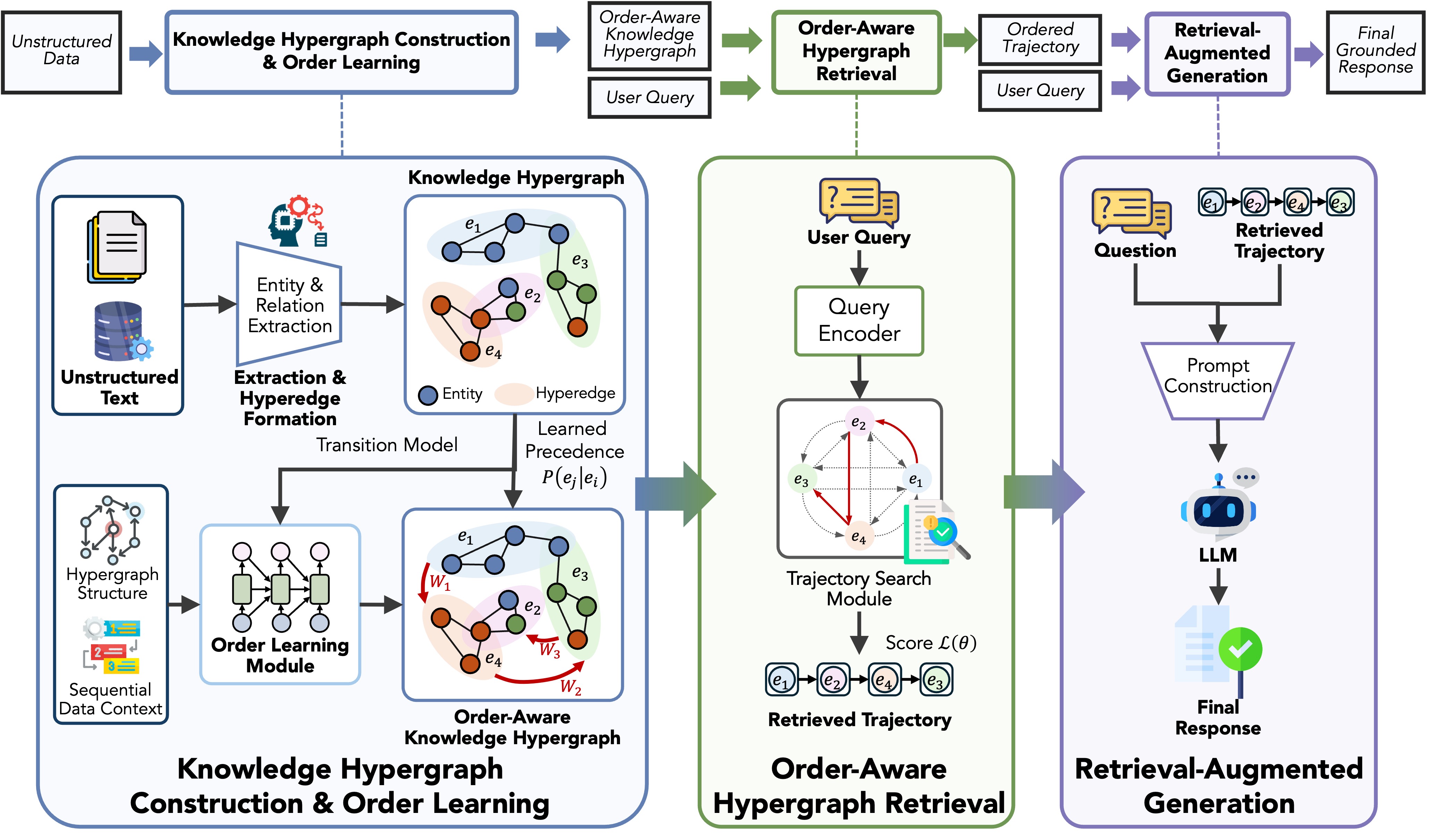
arXivWu, K., Kuai, C., Li, Z., Jiang, J., Shen, S., Wang, S., Hu, C., Tu, Z., Zhou, Y.
Under Review (2026)
# knowledge graph # hypergraph # RAG # LLM
Wu, K., Kuai, C., Li, Z., Jiang, J., Shen, S., Wang, S., Hu, C., Tu, Z., Zhou, Y.
Under Review 2026
# knowledge graph # hypergraph # RAG # LLM
 Under Review
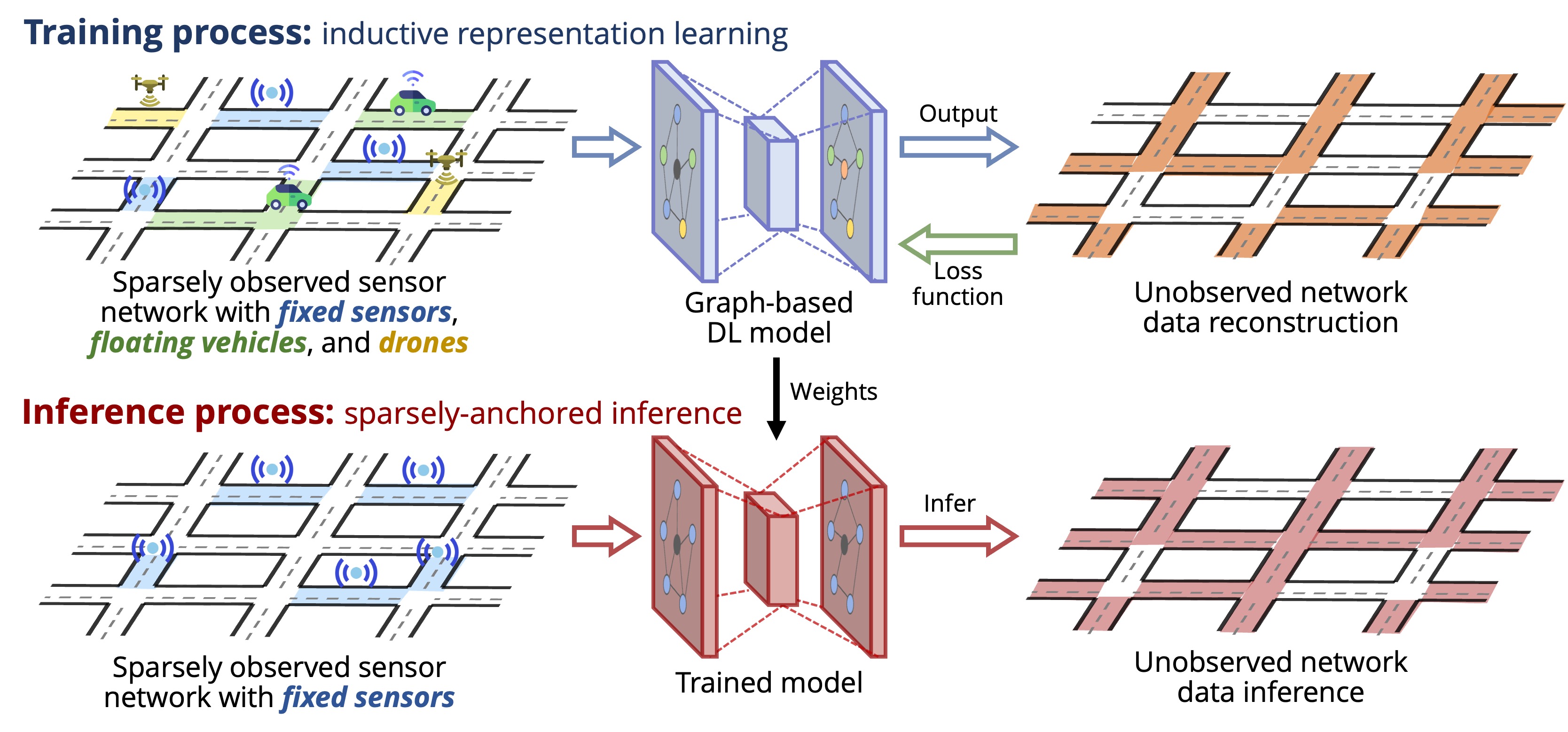
Under ReviewWu, K., Zhou, Y., Li, X., Ye, X., Tu, Z.
Under Review (2026)
# inductive learning # hybrid sensor network # graph transformer
Wu, K., Zhou, Y., Li, X., Ye, X., Tu, Z.
Under Review 2026
# inductive learning # hybrid sensor network # graph transformer
 Under Review
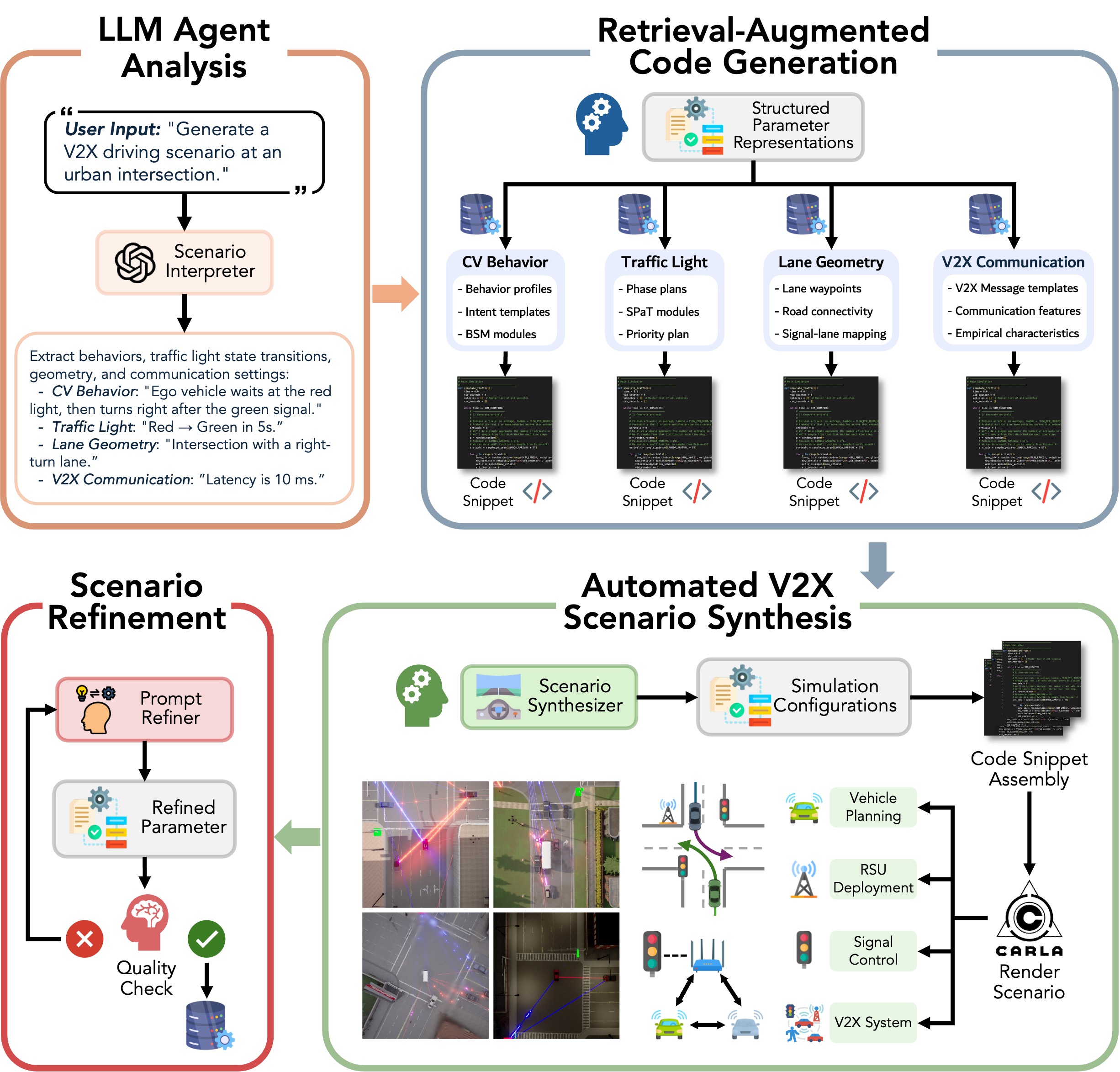
Under ReviewWu, K., Zhang, H., Li, P., Gan, R., You, J., Tu, Z., Zhou, Y.
Under Review (2026)
# LLM # RAG # V2X # scenario generation
Wu, K., Zhang, H., Li, P., Gan, R., You, J., Tu, Z., Zhou, Y.
Under Review 2026
# LLM # RAG # V2X # scenario generation
 arXiv
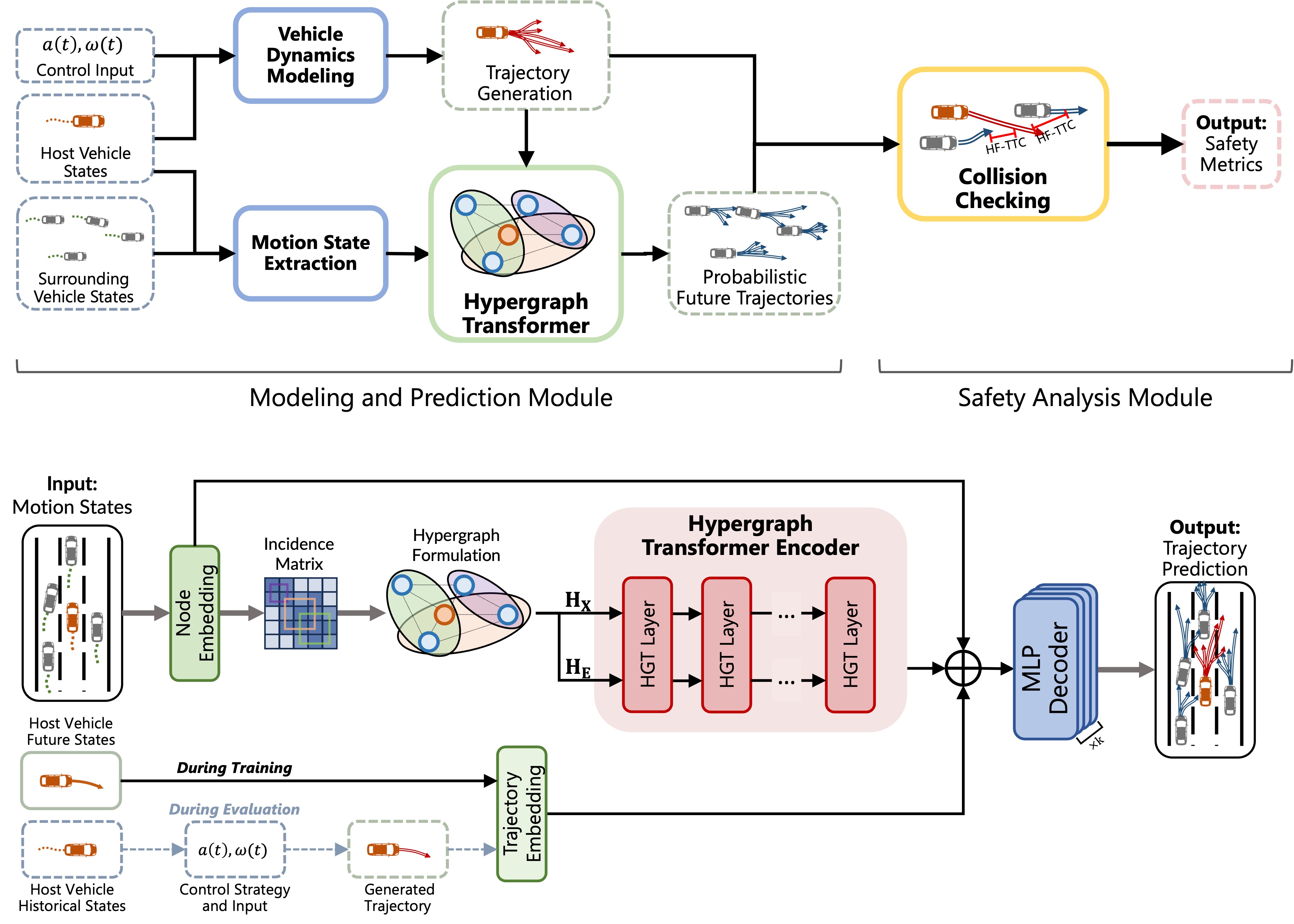
arXivWu, K., Li, Z., Li, S., Ye, X., Lord, D., Zhou, Y.
Under Review (2026)
# active safety # vehicle dynamics # hypergraph
Wu, K., Li, Z., Li, S., Ye, X., Lord, D., Zhou, Y.
Under Review 2026
# active safety # vehicle dynamics # hypergraph
 arXiv
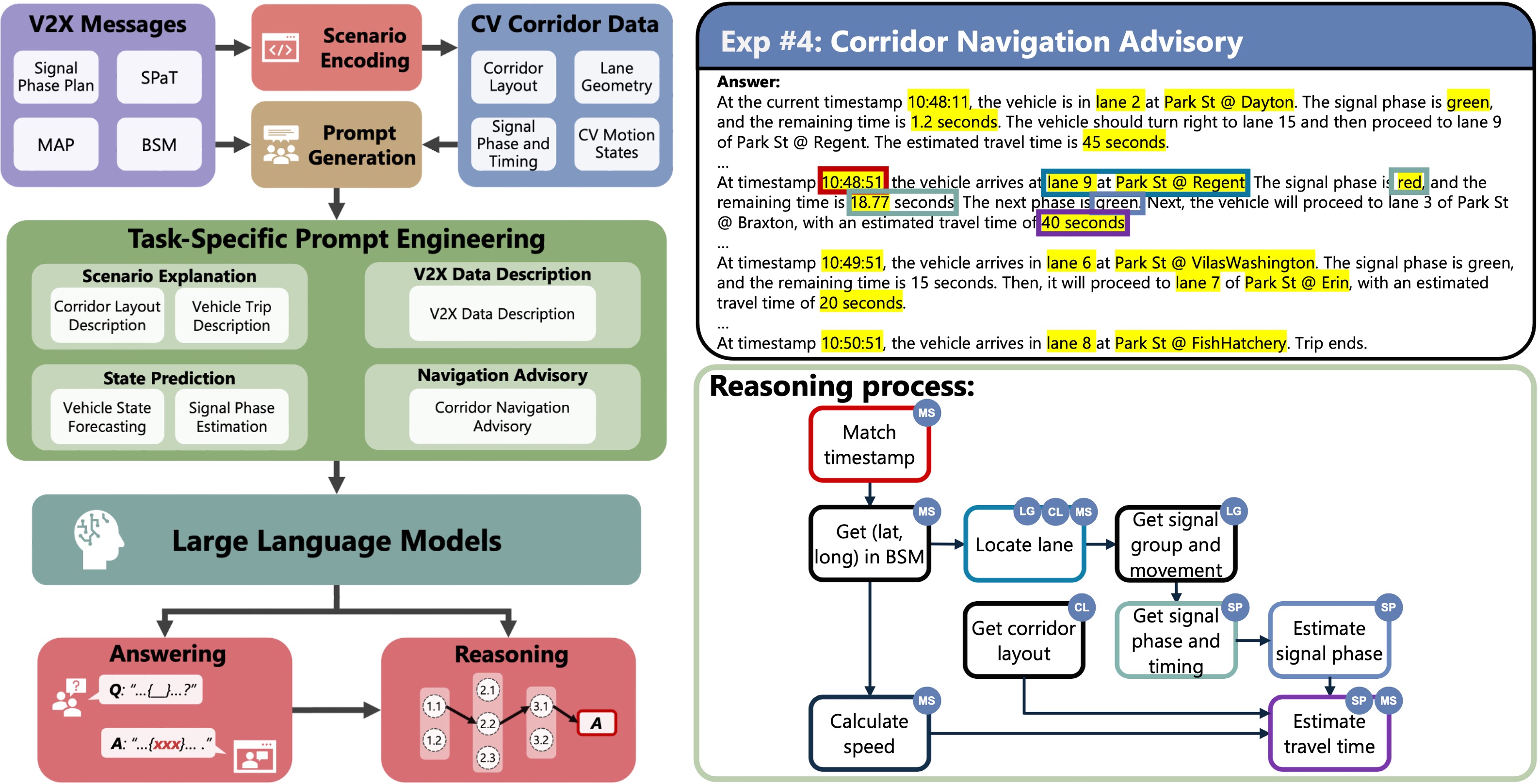
arXivWu, K., Li, P., Zhou, Y., Gan, R., You, J., Cheng, Y., Zhu, J., Parker, S. T., Noyce, D., Ran, B., Tu, Z.
Under Review (2026)
# LLM # V2X
Wu, K., Li, P., Zhou, Y., Gan, R., You, J., Cheng, Y., Zhu, J., Parker, S. T., Noyce, D., Ran, B., Tu, Z.
Under Review 2026
# LLM # V2X
 TR-C
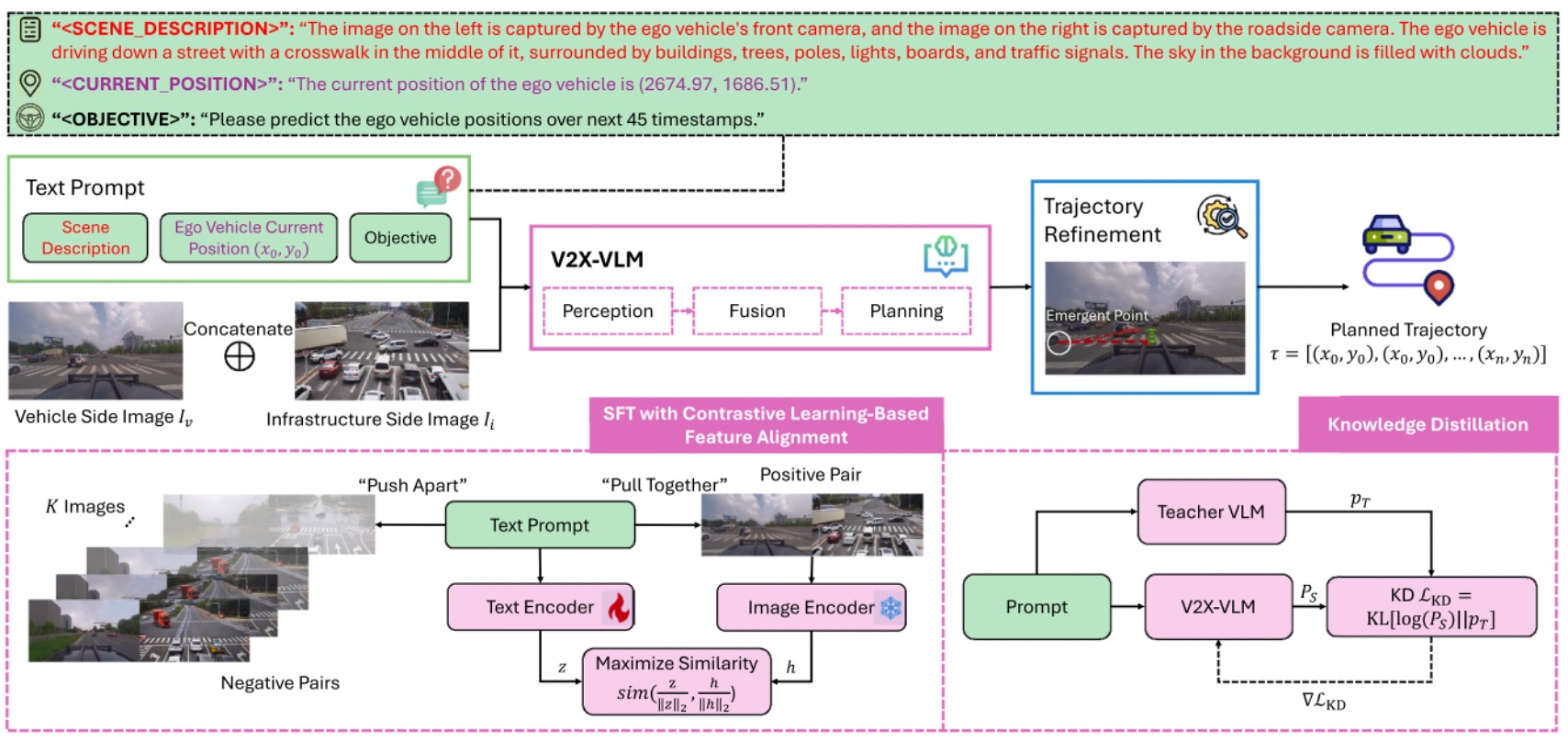
TR-CYou, J., Shi, H., Jiang, Z., Huang, Z., Gan, R., Wu, K., Cheng, X., Li, X., Ran, B.
Transportation Research Part C: Emerging Technologies (2026)
# VLM # V2X # trajectory planning
You, J., Shi, H., Jiang, Z., Huang, Z., Gan, R., Wu, K., Cheng, X., Li, X., Ran, B.
Transportation Research Part C: Emerging Technologies 2026
# VLM # V2X # trajectory planning
 arXiv
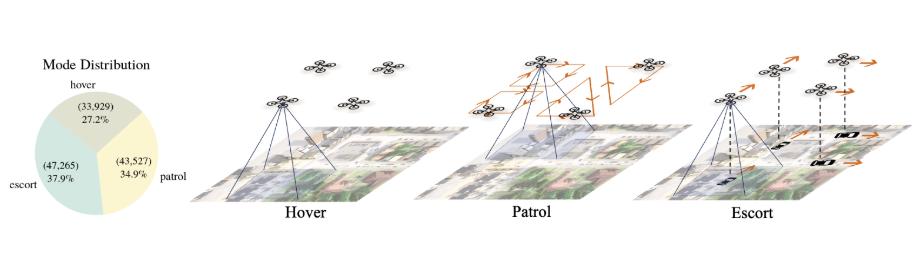
arXivGao, X., Wu, Y.,, Yang, F., Luo, X., Wu, K., Chen, X., Wang, Y., Liu, C., Zhou, Y., Tu, Z.
Under Review (2025)
# cooperative perception # air-ground collaboration # V2X # UAV
Gao, X., Wu, Y.,, Yang, F., Luo, X., Wu, K., Chen, X., Wang, Y., Liu, C., Zhou, Y., Tu, Z.
Under Review 2025
# cooperative perception # air-ground collaboration # V2X # UAV
 COMMTR
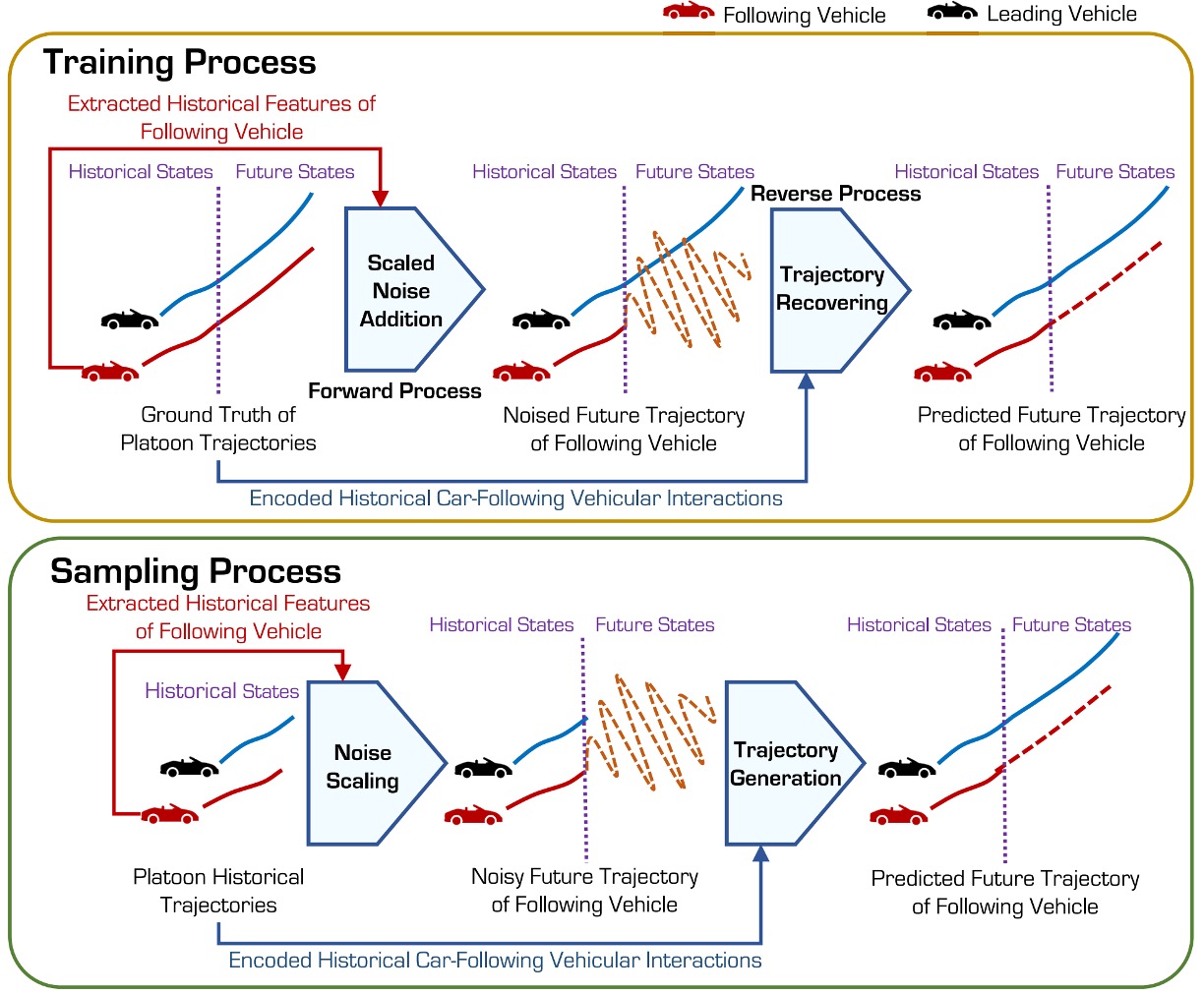
COMMTRYou, J., Gan, R., Tang, W., Huang, Z., Liu, J., Jiang, Z., Shi, H.,, Wu, K., Long, K., Fu, S., Chen, S., Ran, B.
Communications in Transportation Research (2025)
# trajectory prediction # diffusion models # car-following
You, J., Gan, R., Tang, W., Huang, Z., Liu, J., Jiang, Z., Shi, H.,, Wu, K., Long, K., Fu, S., Chen, S., Ran, B.
Communications in Transportation Research 2025
# trajectory prediction # diffusion models # car-following
 IEEE IoT-J
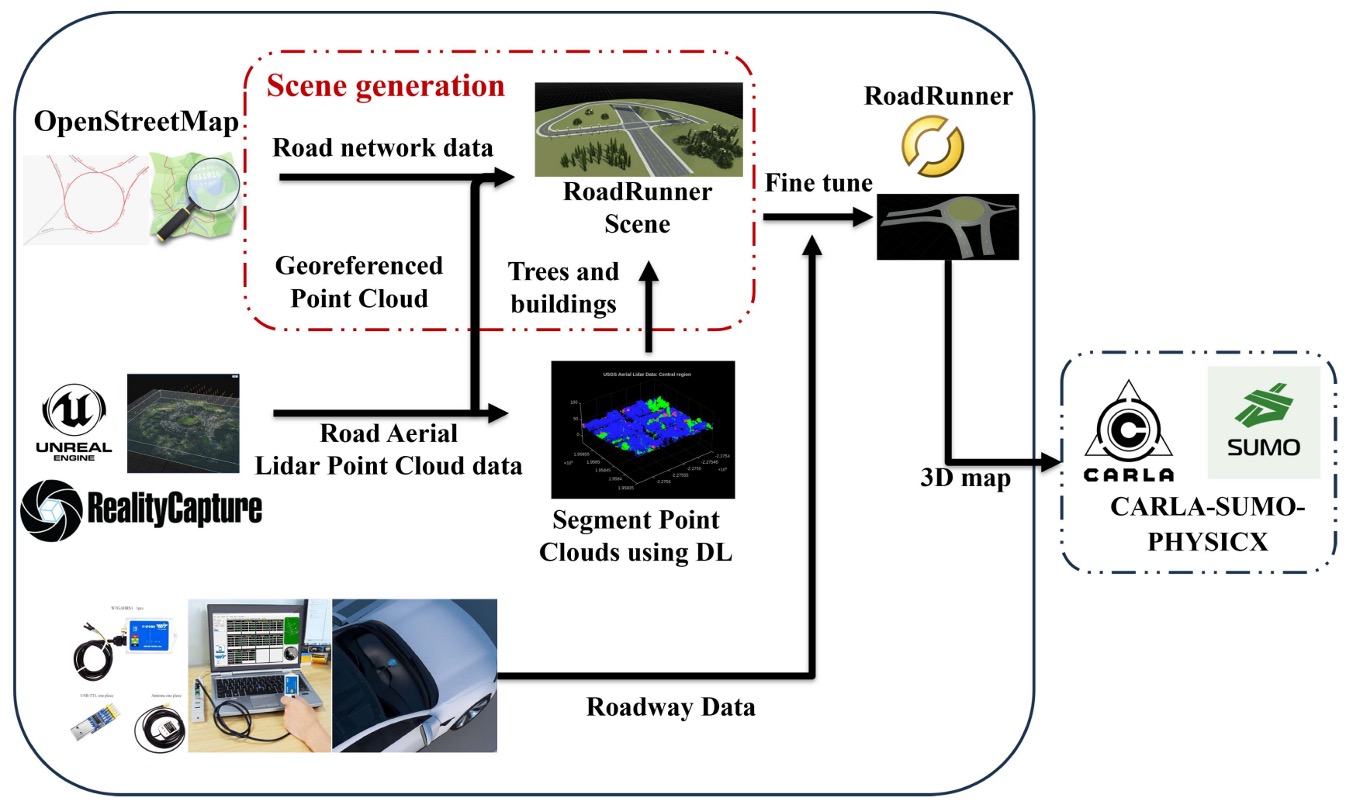
IEEE IoT-JZhang, H., Yue, X., Tian, K., Li, S., Wu, K., Li, Z.,, Lord, D., Zhou, Y.
IEEE Internet of Things Journal (2025)
# digital twin # active safety # autonomous vehicle # high-fidelity simulation
Zhang, H., Yue, X., Tian, K., Li, S., Wu, K., Li, Z.,, Lord, D., Zhou, Y.
IEEE Internet of Things Journal 2025
# digital twin # active safety # autonomous vehicle # high-fidelity simulation
 TR-C
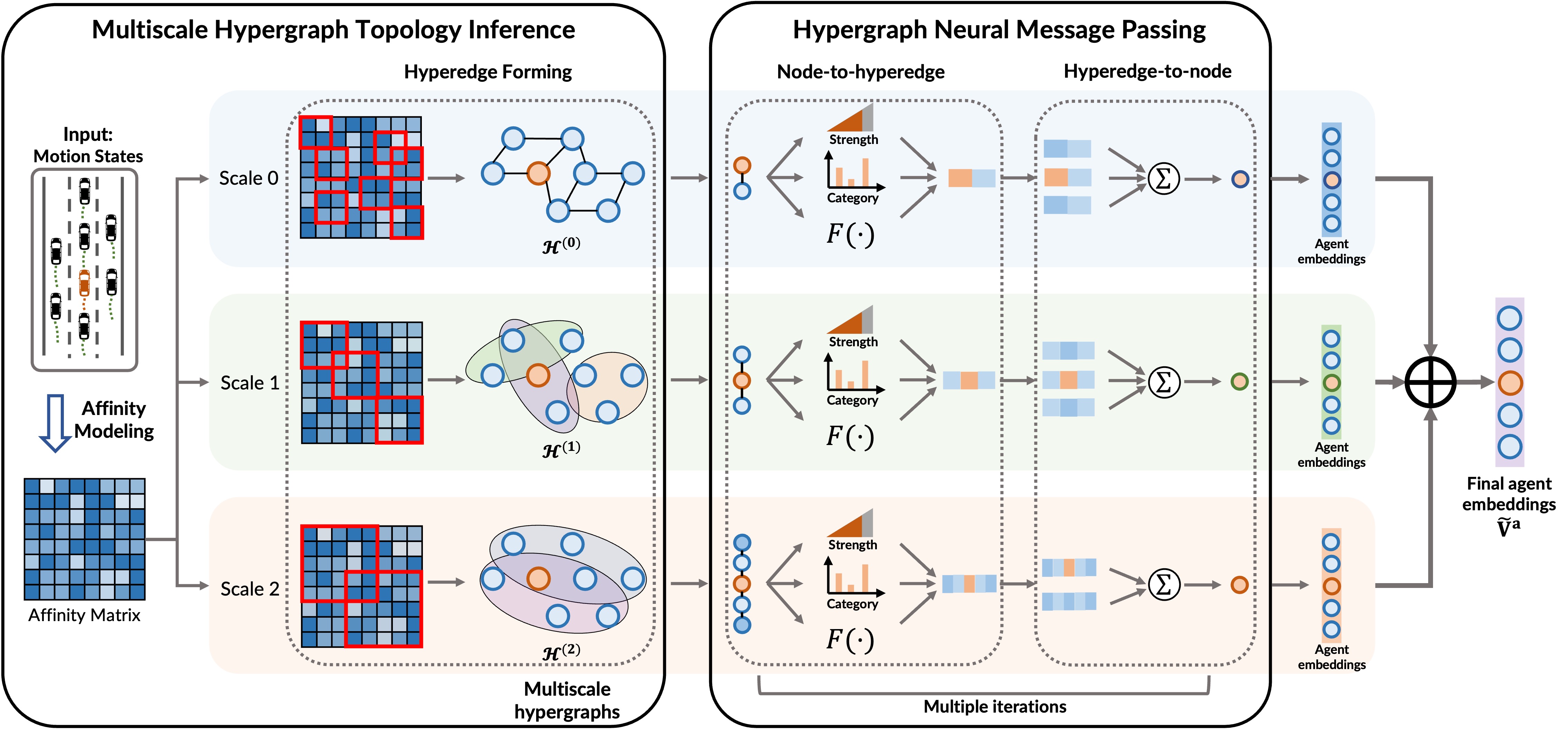
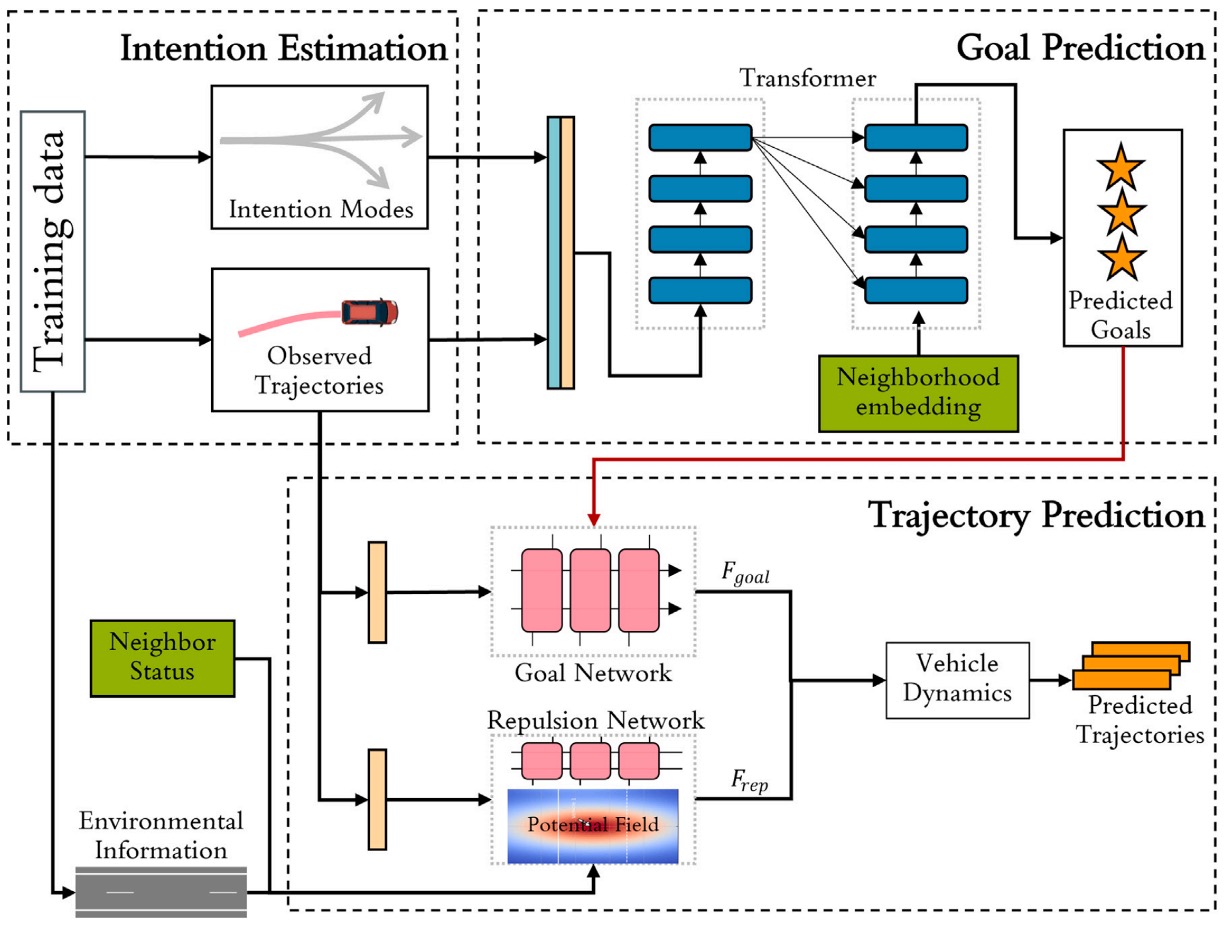
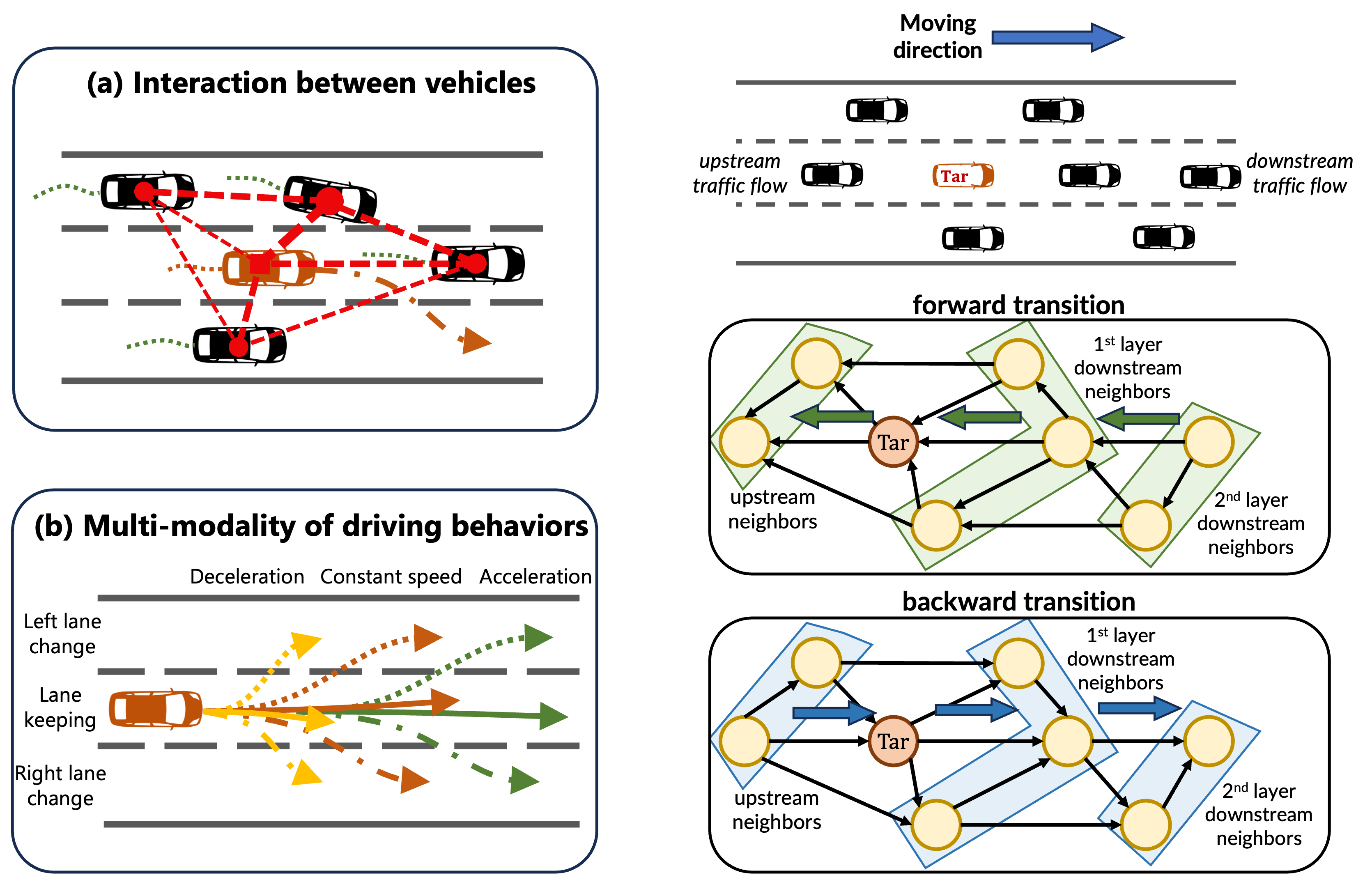
TR-CWu, K., Zhou, Y., Shi, H., Lord, D., Ran, B., Ye, X.
Transportation Research Part C: Emerging Technologies (2025)
# hypergraph # interaction # multi-modality
Wu, K., Zhou, Y., Shi, H., Lord, D., Ran, B., Ye, X.
Transportation Research Part C: Emerging Technologies 2025
# hypergraph # interaction # multi-modality
 IEEE IoT-J
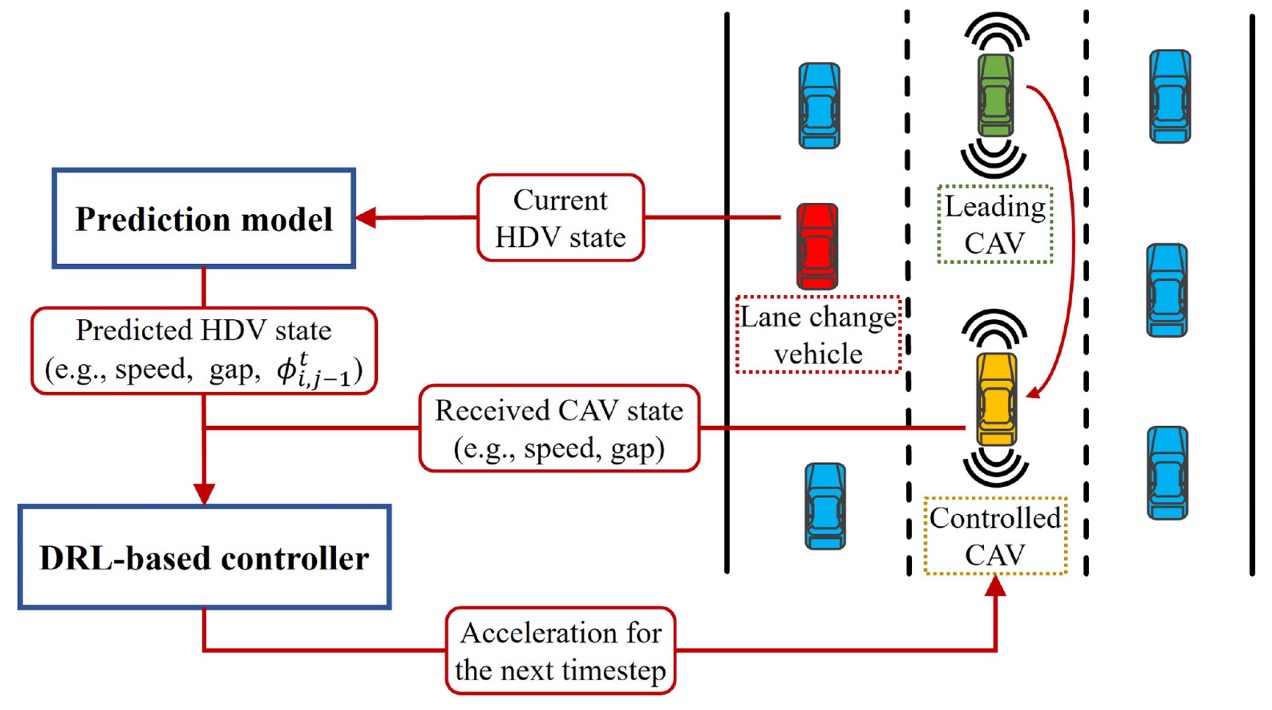
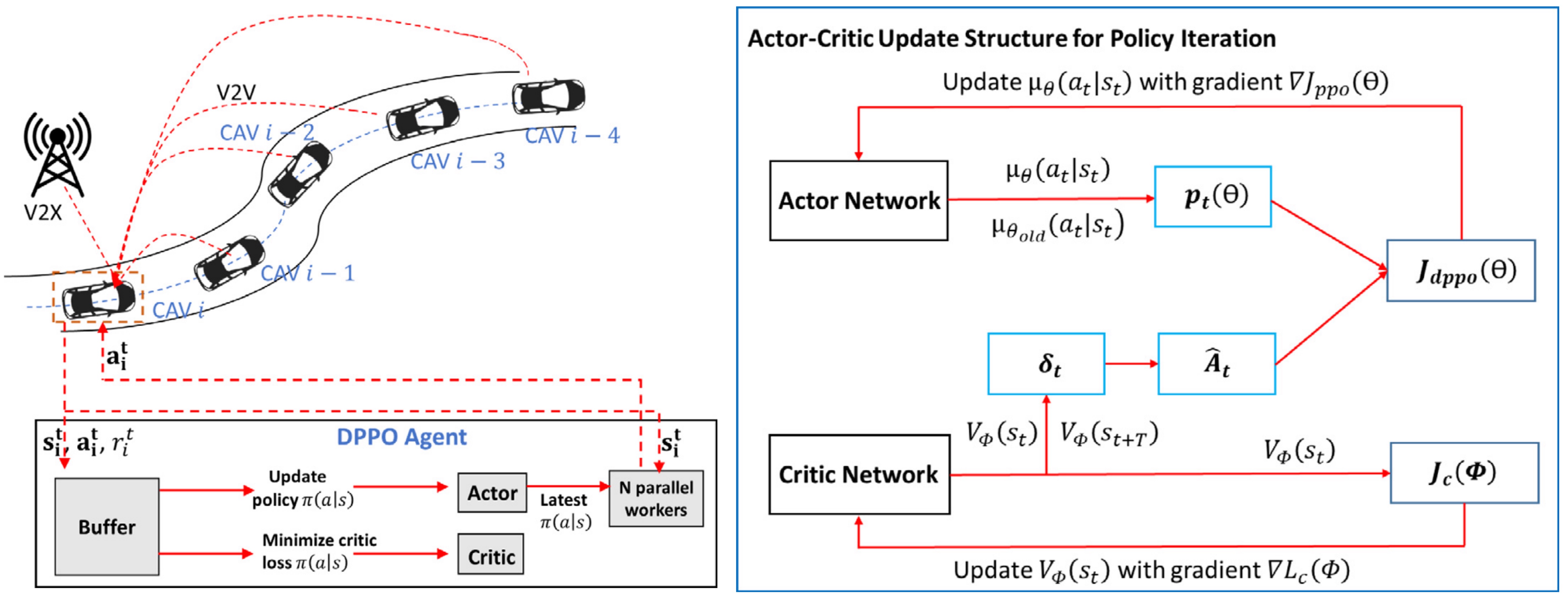
IEEE IoT-JShi, H., Shi, K., Wu, K., Li, W., Zhou, Y., Ran, B.
IEEE Internet of Things Journal (2025)
# DRL # CAV # predictive control
Shi, H., Shi, K., Wu, K., Li, W., Zhou, Y., Ran, B.
IEEE Internet of Things Journal 2025
# DRL # CAV # predictive control
 TR-C
TR-CGan, R., Shi, H., Li, P., Wu, K., An, B., Li, L., Ma, J., Ma, C., Ran, B.
Transportation Research Part C: Emerging Technologies (2025)
# trajectory prediction # neural differential equations # transformer
Gan, R., Shi, H., Li, P., Wu, K., An, B., Li, L., Ma, J., Ma, C., Ran, B.
Transportation Research Part C: Emerging Technologies 2025
# trajectory prediction # neural differential equations # transformer
 IEEE T-ITS
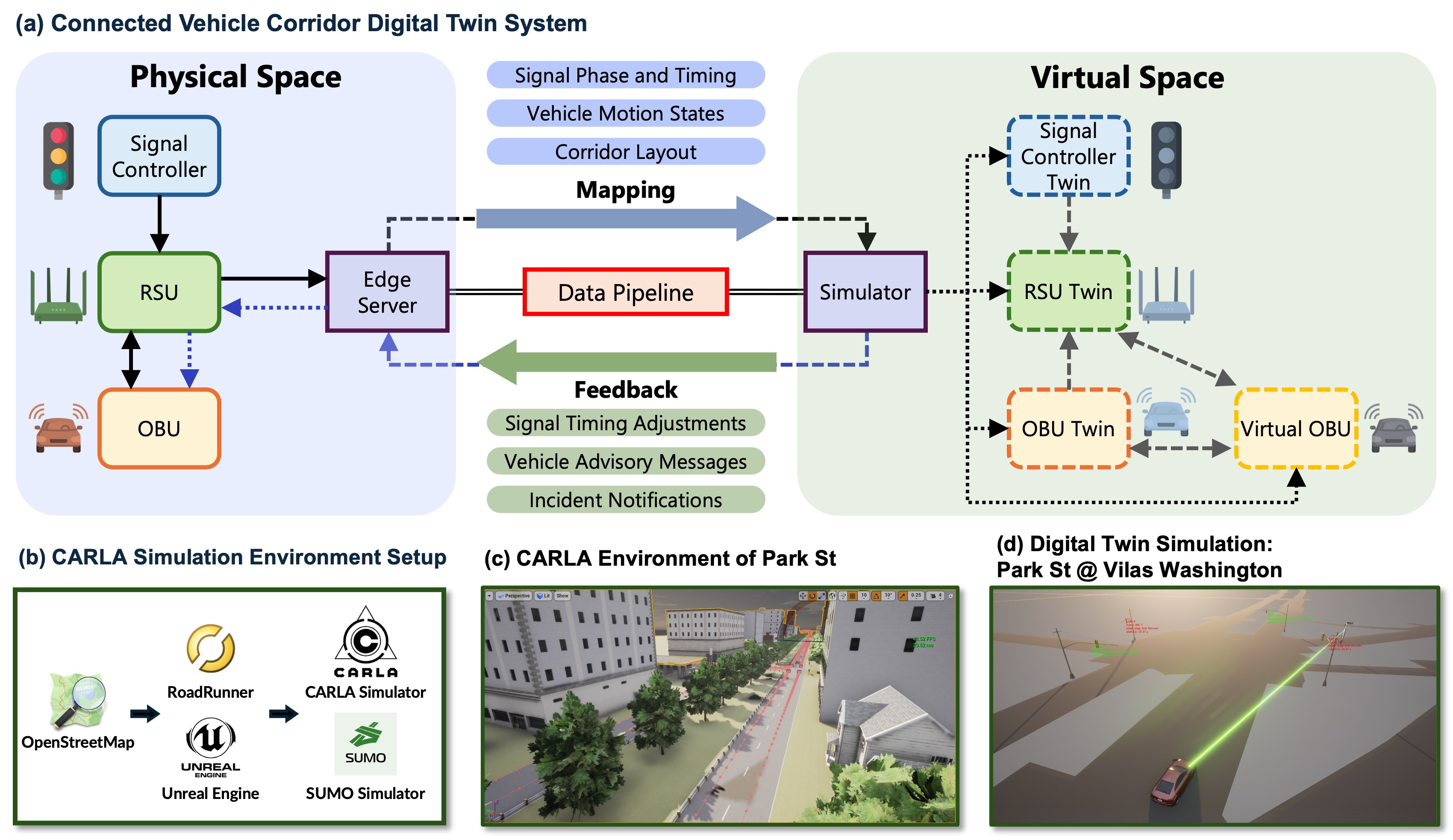
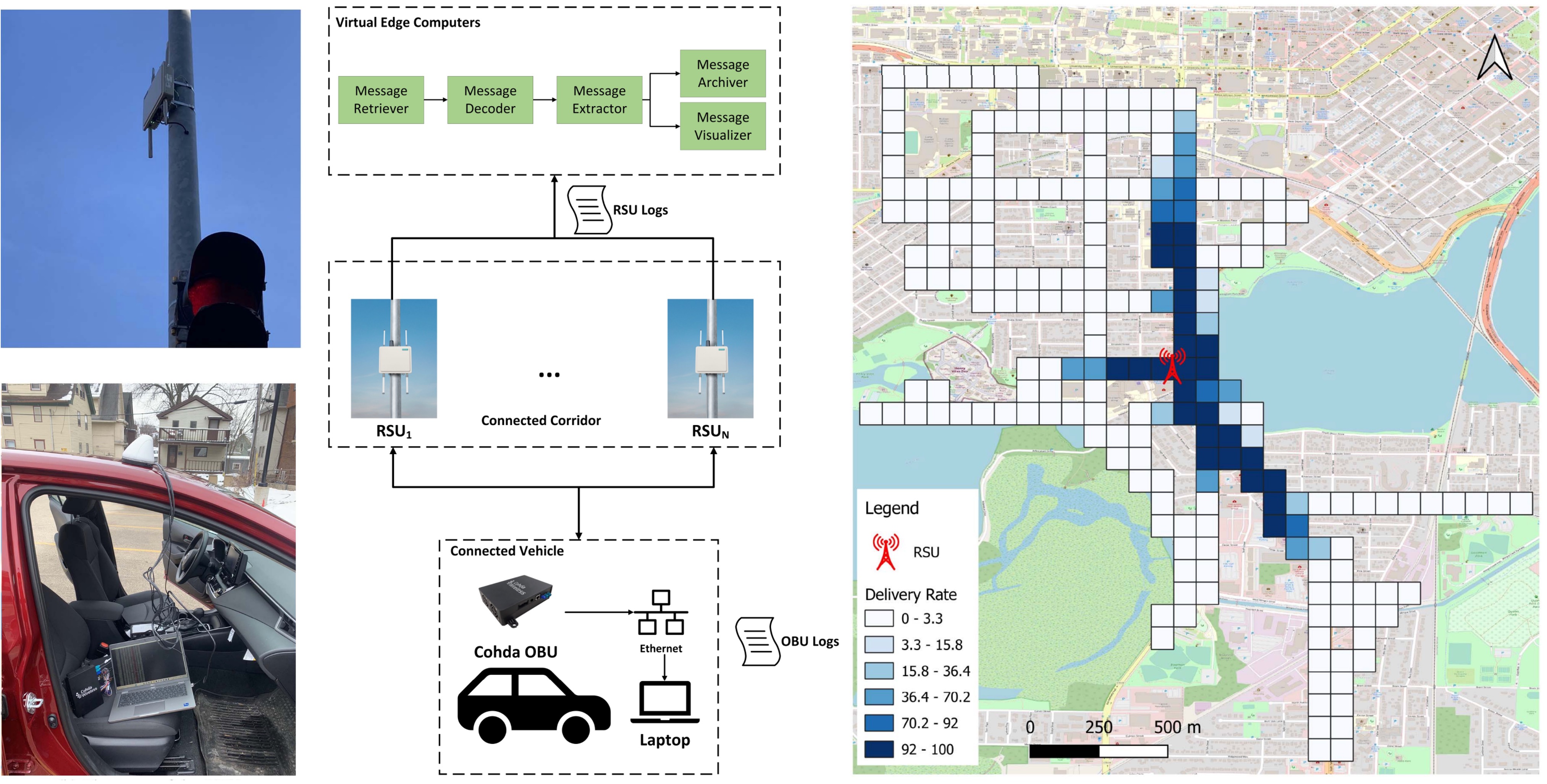
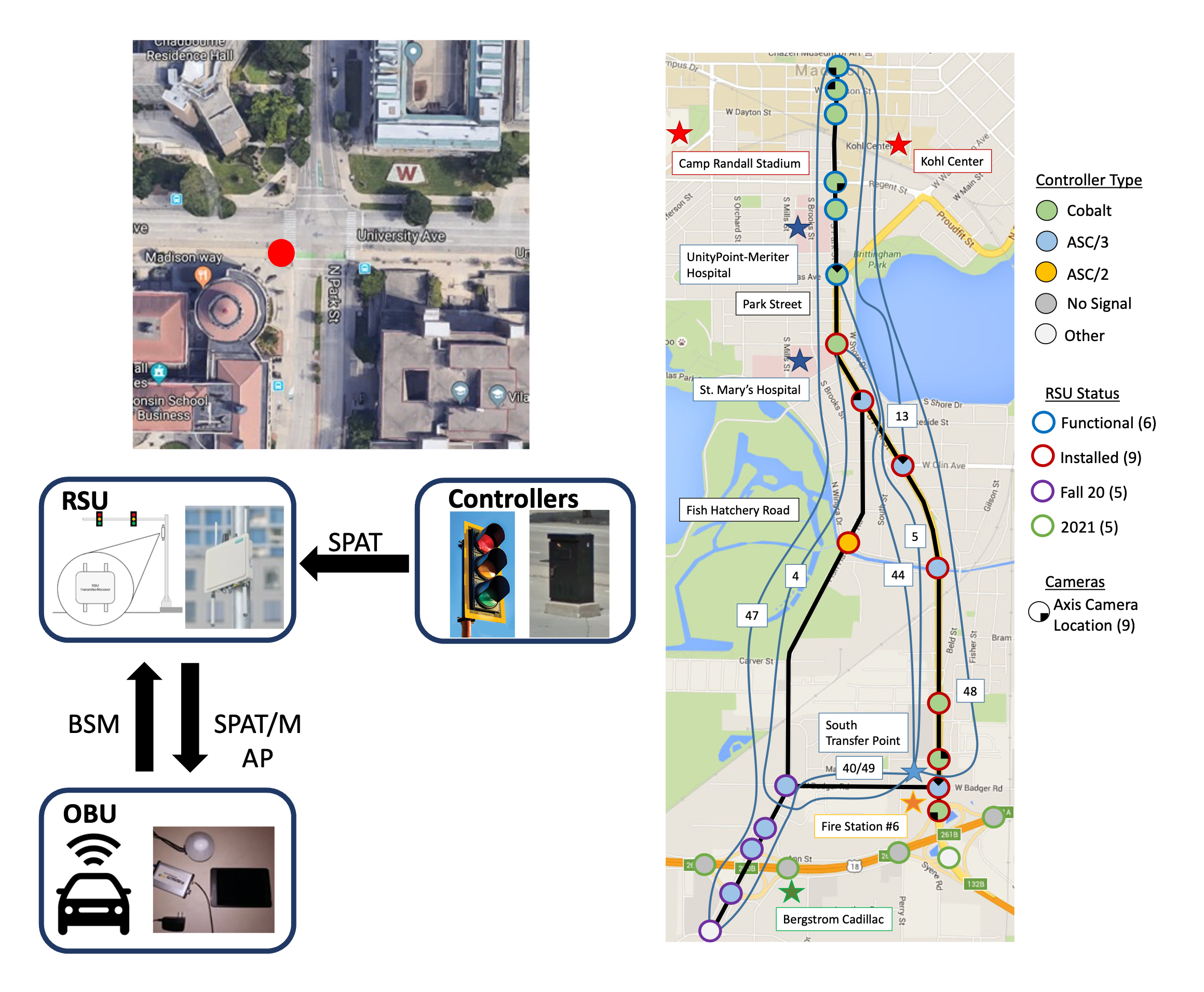
IEEE T-ITSWu, K., Li, P., Cheng, Y., Parker, S. T., Noyce, D.,, Ran, B., Ye, X.
IEEE Transactions on Intelligent Transportation Systems (2025)
# digital twin # V2X # connected vehicle corridor
Wu, K., Li, P., Cheng, Y., Parker, S. T., Noyce, D.,, Ran, B., Ye, X.
IEEE Transactions on Intelligent Transportation Systems 2025
# digital twin # V2X # connected vehicle corridor
 IEEE T-IV
IEEE T-IVLi, P., Wu, K., Cheng, Y., Parker, S. T., Noyce, D. A.
IEEE Transactions on Intelligent Vehicles (2024)
# V2X # V2I # field experiment
Li, P., Wu, K., Cheng, Y., Parker, S. T., Noyce, D. A.
IEEE Transactions on Intelligent Vehicles 2024
# V2X # V2I # field experiment
 IEEE T-IV
IEEE T-IVWu, K., Zhou, Y., Shi, H., Li, X., Ran, B.
IEEE Transactions on Intelligent Vehicles (2024)
# GNN # interaction # mutli-modality
Wu, K., Zhou, Y., Shi, H., Li, X., Ran, B.
IEEE Transactions on Intelligent Vehicles 2024
# GNN # interaction # mutli-modality
 KBS
KBSShi, H., Zhou, Y., Wu, K., Chen, S., Ran, B., Nie, Q.
Knowledge-Based Systems (2023)
# DRL # CAV # 2D control
Shi, H., Zhou, Y., Wu, K., Chen, S., Ran, B., Nie, Q.
Knowledge-Based Systems 2023
# DRL # CAV # 2D control
 ASCE ICTD
ASCE ICTDWu, K., Cheng, Y., Parker, S. T., Ran, B., Noyce, D. A.
ASCE International Conference on Transportation and Development 2023 (2023)
# data pipeline # connected vehicle # v2x corridor
Wu, K., Cheng, Y., Parker, S. T., Ran, B., Noyce, D. A.
ASCE International Conference on Transportation and Development 2023 2023
# data pipeline # connected vehicle # v2x corridor
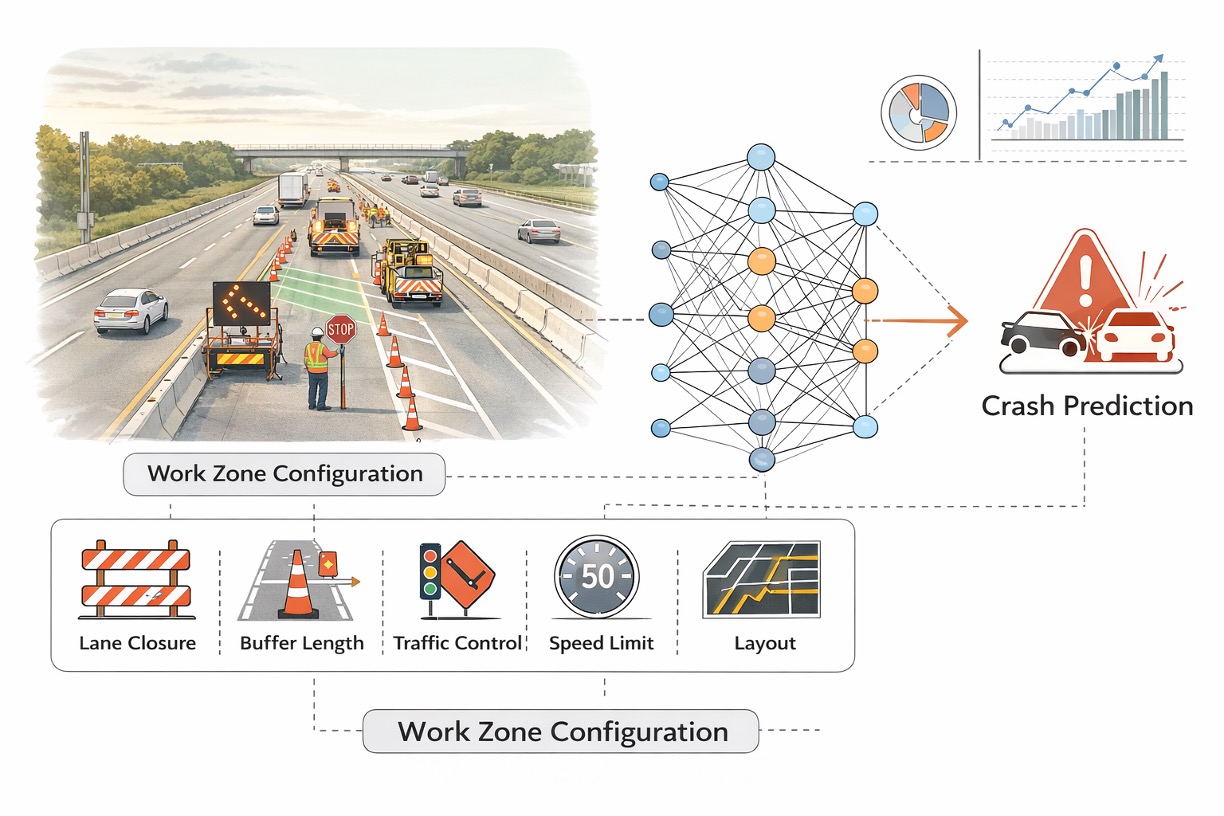 TRR
TRRCheng, Y., Wu, K., Li, H., Parker, S., Ran, B., Noyce, D.
Transportation research record (2022)
# crash prediction # work zone
Cheng, Y., Wu, K., Li, H., Parker, S., Ran, B., Noyce, D.
Transportation research record 2022
# crash prediction # work zone
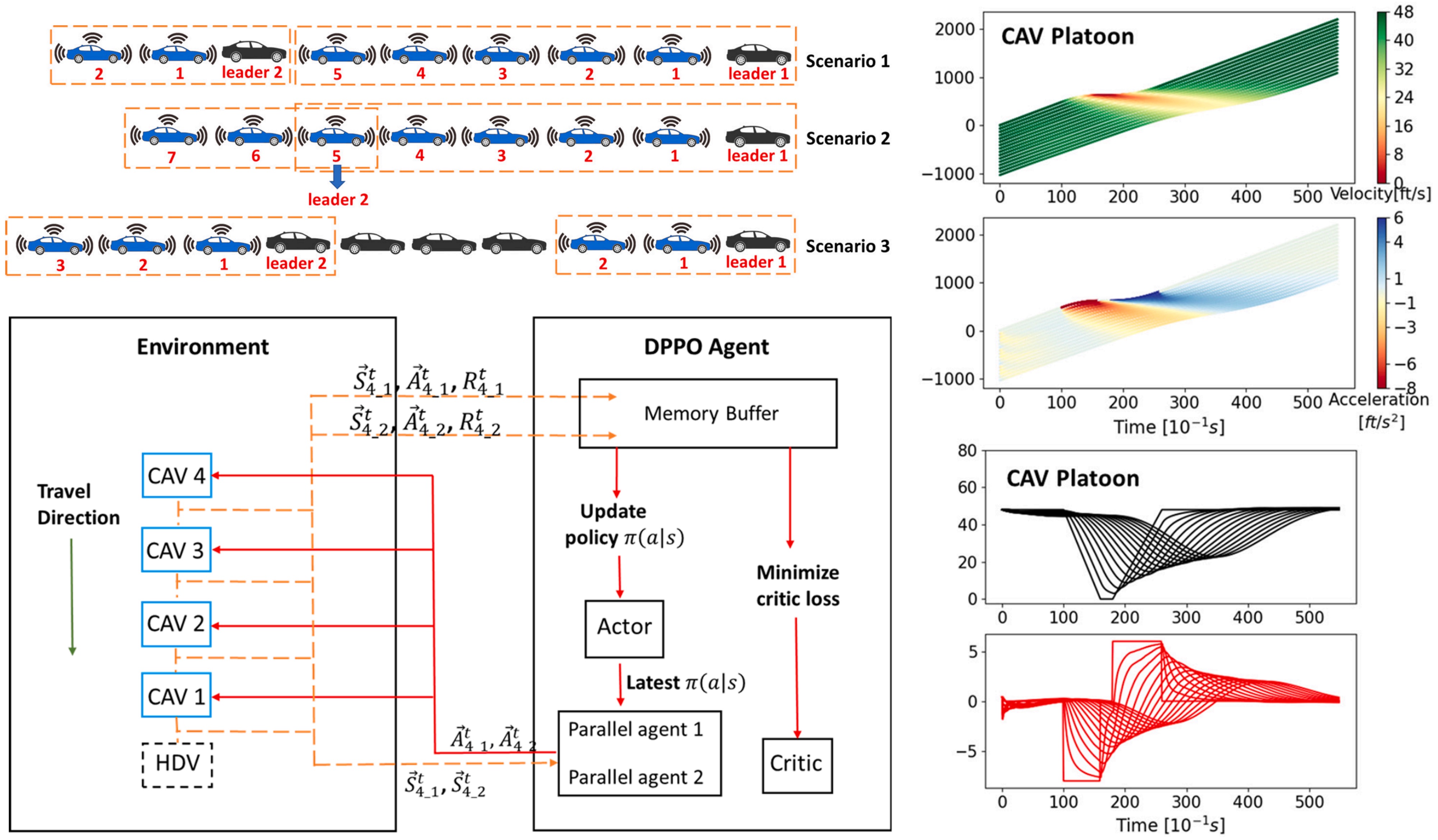 TR-C
TR-CShi, H., Zhou, Y., Wu, K., Wang, X., Lin, Y., Ran, B.
Transportation Research Part C: Emerging Technologies (2021)
# DRL # CAV # cooperative control
Shi, H., Zhou, Y., Wu, K., Wang, X., Lin, Y., Ran, B.
Transportation Research Part C: Emerging Technologies 2021
# DRL # CAV # cooperative control